V
主页
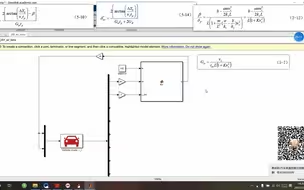
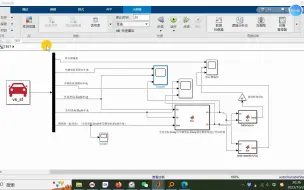
基于车辆线性二自由度模型利用simulink中自带S函数模块编写的卡尔曼滤波算法对质心侧偏角和横摆角速度进行估计
发布人
基于车辆线性二自由度模型利用simulink中自带S函数模块编写的卡尔曼滤波算法对质心侧偏角和横摆角速度进行估计
打开封面
下载高清视频
观看高清视频
视频下载器
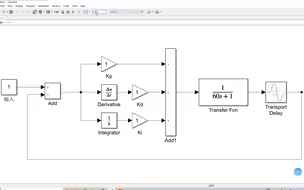
快速入门Simulink的PID仿真
卡尔曼滤波(轨迹速度跟踪)MATLAB和Simulink联合仿真
车辆仿真与建模(一)基于 Simulink 车辆纵向动力学模型的整车控制器能量管理策略开发
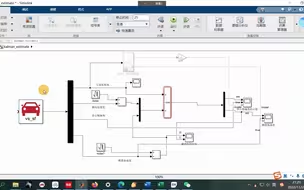
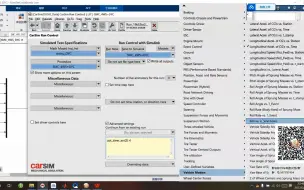
从零开始搭建carsim与simulink联合仿真模型
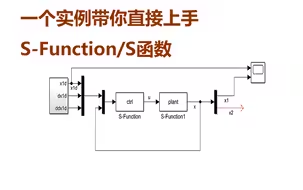
S-Function/S函数,一个实例带你直接上手(非线性反步法搭建)
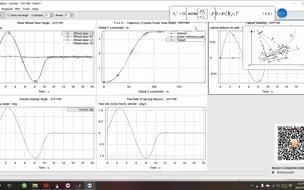
Carsim和、Simulink联合仿真轨迹跟踪保姆级教程二:基于恒定横摆角速度假设并考虑稳态质心侧偏角增益的单点预瞄驾驶员模型的实现
Carsim和Simulink联合仿真轨迹跟踪教程保姆级教程一:基于恒定横摆角速度假设的单点预瞄驾驶员模型的实现
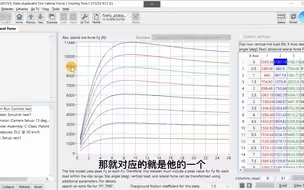
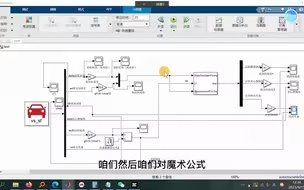
利用carsim中自带轮胎侧向力随侧偏角变化数据对魔术公式中各参数进行拟合
matlab/simulink中卡尔曼滤波模块(kalman filter)的简单介绍
扩展卡尔曼滤波(EKF)在非线性系统利用一维观测量对一维状态量进行估计的小例子
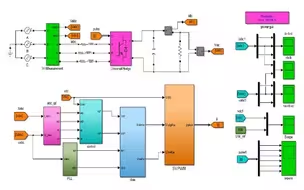
Carsim和simulink联合仿真——实现分布式电驱动汽车四轮转向横摆力矩集成滑模控制
《基于Simulink的汽车动力性能建模与仿真》第007讲:汽车车速、行驶阻力、驱动力输出模块
Carsim与Simulink联合仿真——分布式电驱动汽车模糊直接横摆力矩控制
基于matlab/simulink和carsim仿真模型计算车辆航向角并验证航向角=横摆角+质心侧偏角
Carsim和simulink联合仿真的汽车系统动力学问题
【Matlab/Simulink仿真】MATLAB Simulink仿真搭建及代码生成技术
基于carsim和simulink软件利用航向角(横摆角)将全局坐标系车速坐标转换得到车辆坐标系车速并求解质心侧偏角
解决MATLAB/Simulink和CARSIM联合仿真过程中Simulink中EKF模块报错显示无法找到状态方程和观测方程问题的方法
对上一个视频中魔术公式拟合参数进行修正之后的质心侧偏角估计/横摆角速度估计/纵向车速估计