V
主页
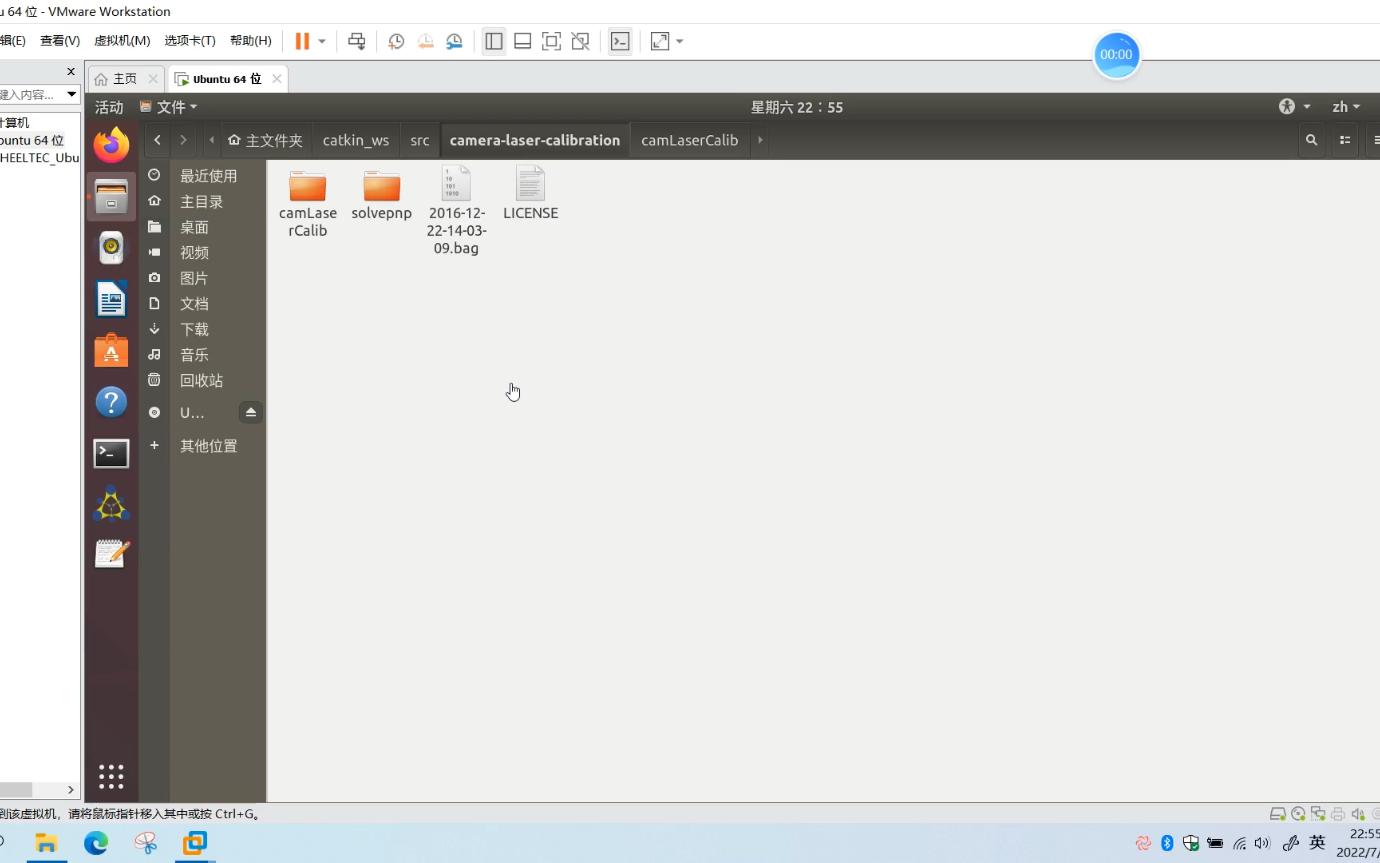
激光雷达和相机联合标定
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
RF2O算法计算时间测试
证明旋转矩阵是正交矩阵
练习11:一维数组应用
自动驾驶入门技术全栈实战解析-2-定位篇
练习10:一维数组基础
清华山东小姑娘,追梦的路上也要保持可爱~
3)CAN位填充与报文收发
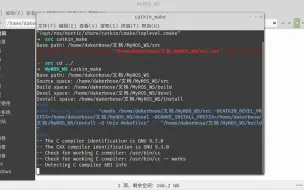
ROS入门1——创建工作区
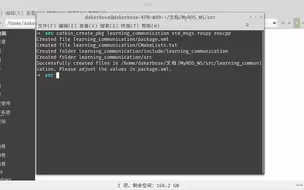
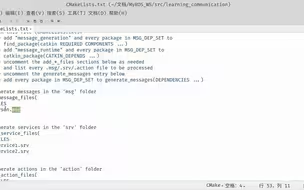
ROS入门2——创建功能包
ROS入门5——服务通信的编程实现
闲置一年的自制ros小车,终于第一次成功利用开源gmapping建图
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
【自动驾驶实践】多激光雷达实车安装&外参标定&拼接预处理
练习13:二维数组应用
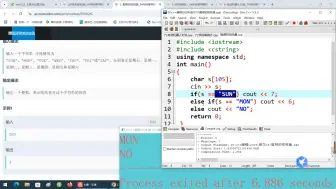
练习15:字符串应用
Qt Quick和halcon联合开发机器视觉软件,包括脚本编辑,软件连接手机相机等功能 #机器视觉#qml#C++
ros入门3——话题编程实现
自动驾驶入门技术全栈实战解析-1-感知篇
从零开始学习CUDA-11-CUDA_Stream和尾声
1)CAN控制器SJA1000简述
跳表复杂度
12步搭建智能机器人: 从设计到AI入门
C++基础
ROS二维码识别跟线案例上
室外ROS 省赛实录 [速度较慢可以展示]
【AI编程共学第一期第二节】0编程基础入门Cursor极简使用指南 讲师:张梦飞
9)SAEJ1939 PDU with PGN
国哥首席:【11月22日-上】俄罗斯洲际导弹打乌克兰,威慑不成反被嘲笑
跳表C++代码介绍
完美解决rosdep update报错——下载到本地
学长说:有佬的帮助就是不一样!!!
【开源无人车】从零组装一辆开源PIX无人车
使用Isaac Sim和ROS2实现大田农业机器人
米哈游一面面试题:C++ QT中信号和槽的原理是什么?
汽车理论——前轮角阶跃输入下的瞬态响应
基于OpenCV和dlib的QT人脸识别项目
ROS控制 | 小车底盘控制讲解
ROS二维码识别跟线案例下
ROS入门4——自定义话题消息
什么?二分之一阶导数?i阶导数?(Riemann-Liouville分数阶导数)