V
主页
京东 11.11 红包
基于行为的机器人群体避障和路径规划
发布人
基于行为的机器人群体避障和路径规划
打开封面
下载高清视频
观看高清视频
视频下载器
基于MATLAB的移动机器人运动规划与避障RRT算法
虚拟环境下基于深度强化学习的无人机路径规划训练含图像信息传递
人工智能机器人影响感知任务空间二次规划控制[下]
基于深度强化学习的机器人自主导航
基于深度强化学习的机器人在多行人环境中的避障实验
动态环境下机器人运动规划与控制有移动障碍物的无人机动画2
动态环境下机器人运动规划与控制有移动障碍物的无人机动画
程序员为什么不能一次性写好,需要一直改Bug?
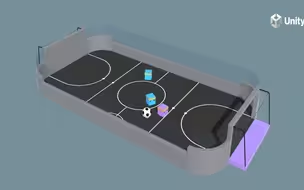
人工智能机器人打乒乓
逆天!字节实习生不满资源分配,恶意注入代码随机修改模型训练梯度,多级反转,官方通报
基于实时模型强化学习的无人机自主导航
具有深度强化学习的自适应交通控制
外骨骼的人机辅助 运动捕捉叠加
校赛最后一周了,逆子还跑这么慢,准备齐赛了
人工智能玩转游戏,小型迷宫逃脱
如何规划路径吃西瓜游戏,深度强化学习演示
人工智能全自动机械手臂实现过程
人工智能智能机械臂在连续控制深度强化学习的自回归策略
基于强化学习协助机器人系统在多个操纵器之间负载均衡。
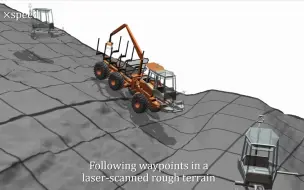
基于深度强化学习的崎岖地形车辆控制,实现自动运行完成货物对接
多智能体深度强化学习在小型迷宫中的训练测试
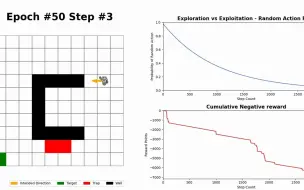
强化学习:基于Q-learning算法训练寻找迷宫的最优路径
人工智能如何取代生活中的人们,渐渐的进入生活。
人工智能强化学习之四足机器人
人工智能踢足球(神经网络和强化学习PPO算法)
人工智能强化学习玩转贪吃蛇
基于深度强化学习的1VS1的机器人PK
人工智能玩转游戏[神经网络和基于强化学习PPO算法]
2023新年快乐,人工智能机器人大总结给你展示不一样的show
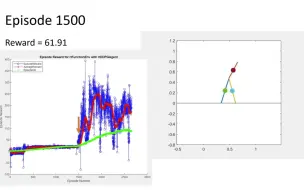
基于深度强化学习训练人工智能完成射箭,看我百步穿杨
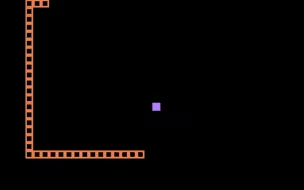
人工智能(强化学习)--玩转简单迷宫
最新!无后座连狙!三角洲行动全面战场武器推荐!PSG-1精准射手步枪
二维双足步行机器人的强化学习控制
机械臂代码讲解-02
《三角洲新武器》T0炮狙AT-4大口径狙击步枪!
深度强化学习仿真,初音未来模仿体操训练
我发明新的编程语言,比java还简单。
【Python抢火车票】假期出行不再困难!使用Python脚本12306自动抢票,100%成功率!!!
四轴飞行器在ROS、Gazebo和Simulink中的路径跟踪和障碍物规避
强化学习 soft actor critic (SAC ) 自动驾驶汽车演示