V
主页
京东 11.11 红包
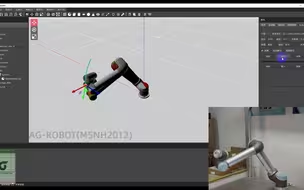
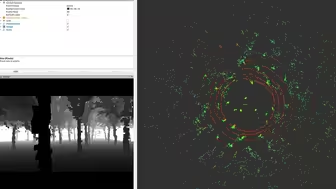
DIY开源步进机械臂+自制robotstudio实现正解、逆解、轨迹规划、碰撞检测(类ROS)
发布人
开源: https://github.com/msnh2012/Msnhnet
打开封面
下载高清视频
观看高清视频
视频下载器
六轴机械臂+DIY RobotStudio正解,逆解,轨迹规划控制实际机器人(ROS)
使用MsnhRobotStudio控制SmallRobotArm教程
UR5+Msnhnet+MsnhRobotStudio实现UR5实际机械臂轨迹规划与控制
机械臂+五指灵巧手+视觉识别
DummyRobot仿真与控制
DIY开源6轴3D打印机械臂+工业化改造尝试
机械臂笛卡尔空间位姿插补
五指灵巧手抓握
端侧部署国产ROS(Moveit)
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
【开源教程】ROS+PX4开源机械臂控制(下)
【即插即用】Pybullet端强化学习算法训练机械臂
一个小巧的6轴机械臂
移动机器人+机械臂测试
视觉组 | YOLO自瞄终于能打中了
MsnhRobotStudio机械臂多点关节空间规划,封闭路径,圆弧规划,封闭圆规划
成为机器人专家的第一步:掌握这3个前提条件 🤖
机械臂CAD模型转URDF并使用MsnhRobotStudio(国产ROS)进行运动学仿真
机械臂点云吸附
法奥FR3 物块抓取案例 ROS MoveIt
基于EMG的智能义肢(Demo)
【开源教程】ROS+PX4开源机械臂控制(上)
这么会玩机械臂 你不要命啦!
数据手套控制五指手
室外ROS 深夜调车,一鼓作寄
机器人技术 | 6 轴测试
开源6自由度机械臂
空间机械臂关节驱动器
rda-ros开源:RDA planner 的ROS接口及在自动驾驶和动态避障方面的应用展示
ROS图像 | 图像目标检测模型训练教程
机器人全面进入装修行业,你看好吗?
我跟你们这群研究机械臂的拼了!竟然连体感追踪都整上了
六自由度机械臂重力补偿控制
一个基于CUDA的真实丛林环境的仿真
盘点那些有趣的开源机械臂18
把玩 HybridAstar -- 双向搜索初步
四足机器人足臂协同 ocs2 qm_control 开源项目学习
生活不易你就摇摆吧Zombie即将开源
225 机器人码垛和物流仓库
如何使用 arduino 制作机器人 Scara - 第 1 部分