V
主页
京东 11.11 红包
【开源】Lidar-IMU-Localization,基于先验地图和激光里程计约束的定位系统
发布人
【开源】https://github.com/chengwei0427/Lidar_IMU_Localization 参考LIO-Livox和ICRA2021论文,简单实现的基于先验地图和激光里程计约束的定位系统
打开封面
下载高清视频
观看高清视频
视频下载器
基于先验地图的通用激光雷达定位框架
CT-LIO: Continuous-Time LiDAR-Inertial Odometry
【开源】Lidar-IMU-Localization,基于先验地图和激光里程计约束的定位系统
【开源】一种快速鲁邦的激光里程计方法
【开源】Livox Mid-360 with IESKF - LIO
optimize-lio
3D激光定位测试
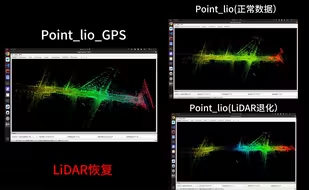
Point_lio_gps解决LiDAR退化导致的里程计漂移。
STD闭环测试
手持mid-360多楼层LIO构图测试
【开源】纯GPS定位,输出位置和方向(gnss_localizer)
激光里程计最新成果展示
【已开源】IESKF-LIO,基于迭代卡尔曼滤波的激光里程计
自研激光里程计,对比fast-lio2
手持mid-360隧道LIO构图测试
【开源】IESKF-LIO,基于迭代卡尔曼滤波的激光里程计(fast-lio2复现)
自研反光柱定位(ROS版)
【开源】M-IESKF-LIO,基于迭代卡尔曼滤波的激光里程计(多激光同时构图)
Cont2-LeGO-LOAM,测试Cont2(2023 ICRA)及scancontext(2018 IROS)闭环
【开源】BoW3D-LeGO-LOAM,测试BoW3D(2022 RA-L)及scancontext(2018 IROS)闭环
optimize-lio
空旷田野LIO测试
CT-LIO: Continuous-Time LiDAR-Inertial Odometry
【开源】快速(纯)激光里程计测试demo
手持旋转扫描仪构图测试(alpha_lidar)
【开源】IESKF-LIO+Greedy based Feature Select
voxelmap-based LIO
轨道车辆激光LIO测试
自研激光里程计,测试NCLT数据
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
【开源】SSL_SLAM3_modified测试
HM-LIO: A Hash Map based LiDAR-Inertial Odometry
[开源]基于LIO的OS1-32激光里程计(手持,电瓶车城市道路采集)
动态点滤除demo
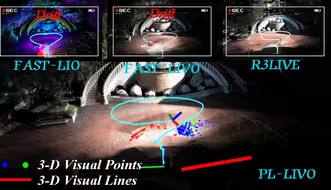
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
3d LiDAR Location test
LIO部分退化场景构图测试
自研多传感器融合定位
基于ROS2的树莓派自主定位与导航小车
【已开源】fast_lio1.0版本适配传统多线激光