V
主页
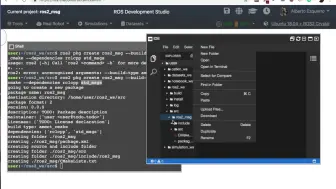
ROS2视频教程之如何创建ROS2的工作空间
发布人
转载自Youtube视频教程 介绍如何创建ROS2的工作空间
打开封面
下载高清视频
观看高清视频
视频下载器
ROS2视频教程之如何创建ROS2节点
ROS2视频教程之如何用C++创建ROS2包
ROS2视频教程之如何用Python创建ROS2包
ROS2视频教程之运动规划库MoveIt使用的教程
ROS2视频教程之如何创建ROS2自定义消息
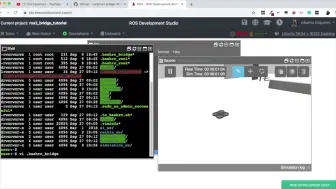
ROS2视频教程之如何用ROS2桥接到ROS1
ROS2视频教程之如何发布和订阅ROS2主题
ROS2视频教程之如何使用ament_python编译ROS2包
《ROS 2机器人开发从入门到实践》1.2.4 在Ubuntu中安装ROS2
《ROS 2机器人开发从入门到实践》1.1 ROS部落的自我介绍
《ROS 2机器人开发从入门到实践》1.2.1~1.2.3 ROS2开发环境搭建之安装虚拟机和Ubuntu
宇树K1机械臂的视觉抓取仿真
《ROS 2机器人开发从入门到实践》 2.2 使用功能包组织Python节点
ROS2入门系列视频教程 (六)| rqt工具箱
《松灵ROS2开讲啦》第四期直播课:ROS 2代码实践
Unitree 2024 ROS暑期学校课程视频02-人形机器人H1开发分享
202408北京WRC VEX VRC高中组冠军
《ROS 2机器人开发从入门到实践》1.3 运行你的第一个机器人
作为 ROS1 开发人员学习 ROS2 并迁移您的 ROS 项目
机械臂协调控制复现
ROS2之多传感器融合包Robot-Localization的使用
《ROS 2机器人开发从入门到实践》 2.4 多功能包的最佳实践WorkSpace
帮粉丝做的任务:强化学习控制机械臂完成抓取以及插销
能帮老人大小便的护理机器人上市了
快速流畅!人工智能ROS小车雷达导航、路径规划、虚拟仿真、slam导航算法
《ROS 2机器人开发从入门到实践》 2.3 使用功能包组织C++节点
《ROS 2机器人开发从入门到实践》2.5.3.1多线程与回调函数Python示例
《ROS 2机器人开发从入门到实践》2.5.1ROS2基础之编程:面向对象编程Python示例
《ROS 2机器人开发从入门到实践》2.5.1ROS2基础之编程:面向对象编程C++示例
移动机械臂抓取
2025工创赛物流搬运机器人规则分析与备赛计划
《ROS 2机器人开发从入门到实践》 1.4.3 在Linux中编写Python代码
套件课程--LIO-SAM的介绍和使用
真假机器人,傻傻的分不清楚
ROS2入门系列视频教程 (八)| ROS2话题通信的c++实现发布方
3D打印机器人头部(开源
Unitree 2024 ROS暑期学校课程视频01-四足机器人Go2开发分享
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
《ROS 2机器人开发从入门到实践》 2.1.2编写你的第一个节点( C++ 示例)
中美两国最新养老机器人,养老不再靠子女。做家务做护理样样行。