V
主页
ROS2入门系列视频教程 (八)| ROS2话题通信的c++实现发布方
发布人
本期视频详细讲解了ROS2通信机制中话题(Topic)通信的C++实现方式。通过实例代码和清晰的讲解,我们学习了如何在C++中创建话题发布者,编写消息类型,以及如何将数据发布到指定的话题上。这一过程是ROS2应用开发中不可或缺的一环,对于理解ROS2的分布式通信模型具有重要意义。
打开封面
下载高清视频
观看高清视频
视频下载器
ROS2入门系列视频教程 (六)| rqt工具箱
ROS2入门系列视频教程 (七)| ros2bag
ROS2功能系列视频教程 (一)| ROS2小车上手操作
ROS2入门系列视频教程 (十)| ROS2话题通信的python实现
ROS2入门系列视频教程 (二)| ROS2体系框架
ROS入门系列教程|WHEELTEC
《ROS 2机器人开发从入门到实践》3.3.2订阅pose实现闭环控制
ROS2功能系列视频教程 (六)| ROS2 2D导航
ROS2功能系列视频教程 (十一)| ROS2 USB手柄控制
ROS2功能系列视频教程 (二)| ROS2键盘控制
ROS2功能系列视频教程 (三)| ROS2gmapping建图
《ROS 2机器人开发从入门到实践》2.5.3.2多线程与回调函数C++示例
【OCS2】进阶Demo也都迁移到ROS2啦
激光SLAM的入门讲解视频教程(一)|SLAM简介
ROS入门教程系列(七)——ROS多机通信设置(WHEELTEC)
ROS2入门系列视频教程 (一)| ROS2概述
【整整600集】清华大佬256小时讲完的Python教程,零基础小白轻松入门,2024最新版!全程干货无废话,这还学不会,我退出IT圈!
《ROS2 机器人操作系统》实验一:ROS2 的安装
ROS入门系列教程(五)——ROS传感器介绍(WHEELTEC)
ROS2功能系列视频教程 (五)| ROS2 cartographer建图
ROS2功能系列视频教程 (十)| ROS2 WEB浏览器监控
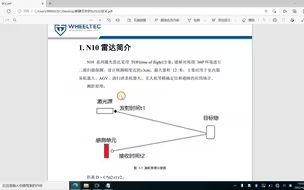
手把手教你如何通过STM32与N10激光雷达实现小车避障
ROS2入门系列视频教程 (四)| ROS2命令行工具
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
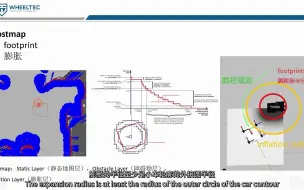
ROS 2D导航原理系列(一)|Costmap
《ROS 2机器人开发从入门到实践》2.5.1ROS2基础之编程:面向对象编程C++示例
《ROS 2机器人开发从入门到实践》3.4.1完成工程架构设计
ROS 2D导航原理系列教程合集(WHEELTEC)
ROS2自动驾驶|边做边学(二)地图与定位
《ROS 2机器人开发从入门到实践》3.2.1通过话题发布小说
(开源)哪吒ROS2 -快速上手案例 >> NeZha_Mini ROS2 学习教程(旭日派、视觉AI、建图导航、自动驾驶、服务、智能救援机器
ROS Moveit桌面机械臂进阶视频教程(四)|Move_Group_Interface C++部分函数讲解
从零开始实现一个球平衡机器人(附源码讲解)
【全549集】这绝对是B站最全最细的零基础python全套教程,清华大佬专为零基础小白研制,7天学完即可进阶至大神!存下吧,很难找全了!
《ROS 2机器人开发从入门到实践》3.4.5订阅数据并用Qt显示
ROS Moveit桌面机械臂进阶视频教程(三)|Rviz界面Motion_Planning插件讲解
《ROS 2机器人开发从入门到实践》3.4.3系统信息获取与发布
《ROS 2机器人开发从入门到实践》4.2.3人脸检测服务实现
高清 1080P C++面向对象高级编程(侯捷) P2 2 头文件与类的声明
ROS Moveit桌面机械臂进阶视频教程(二)|Moveit_Setup_Assistant配置讲解