V
主页
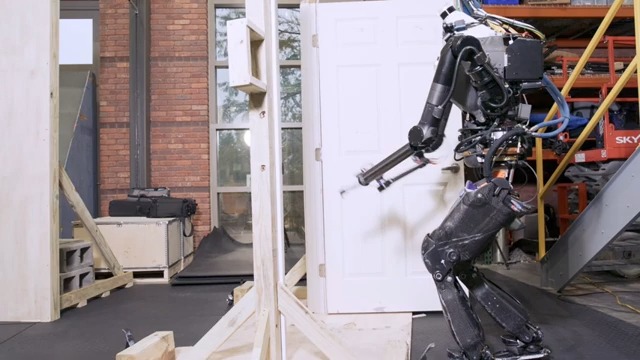
[搬] 双足机器人自主实现开门通过类人行为-Nadia
发布人
https://www.youtube.com/watch?v=2NcEx3FzO6g 原标题: Autonomous Door Traversal Behaviors 视频作者:IHMC Robotics 配备了新的行为架构后,Nadia 可以自主导航和穿越多种类型的门。Nadia 还通过自动重试和继续,展示了对抓取失败和开门尝试的稳健性。我们为机器人提供了拉门和推门、四种开门机制,甚至还有弹簧式闭门器。
打开封面
下载高清视频
观看高清视频
视频下载器
基于质心动量的人形推动恢复(搬)
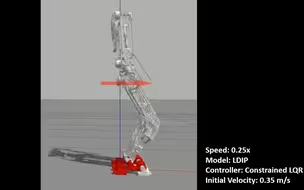
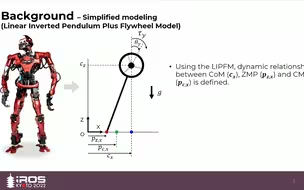
基于线性化双倒立摆的仿人机器人推送恢复 (搬运)
Xsense离职大佬意外泄漏了公司IMU核心算法代码,这个瓜有点大,快来看看代码吧
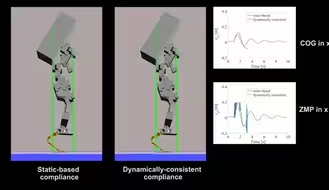
[搬] 基于柔顺性优化的刚软混合系统类人机器人运动控制
Humanoid Balance Control using Centroidal Angular Momentum based on HQP(搬运)
具有链接灵活性的双足机器人的扭矩控制运动(搬)
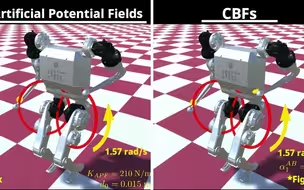
使用具有控制屏障功能的全身控制的人形自碰撞避免(搬)
[搬] 通过 3D SLIP+足部动力学实现高度机动的人形跑步
过动态交互的双边反馈远程操作类人机器人(搬)
[搬] 利用实时非线性 MPC 的双足运动Seamless反应策略
(搬运) Learning to Walk and Fly with Adversarial Motion Priors (IROS 2024)
台湾抽象于北辰:要用粘鼠板打败我们的机械狗
[搬] 高比率谐波传动摩擦建模的物理知识学习 (机翻)
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
Humanoid Robot LOLA v1.1 - 硬件升级验证 - 初始测试 (搬)
具有分层逆动力学的扭矩控制类人动物的平衡实验 2014(搬运)
使用惯性信息估计有腿机器人的概率接触状态(搬运)
人形机器人 双足机器人 DIY全3D打印
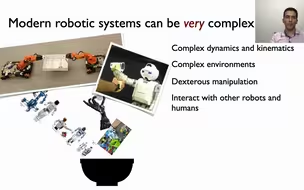
复杂的机器人系统:使用对偶四元数代数建模、控制和规划
通过深度学习加快基于优化的运动规划速度(搬)
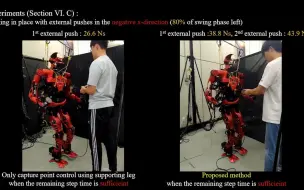
基于捕获点控制的双足支撑时间调整的仿人踏步算法(搬运)
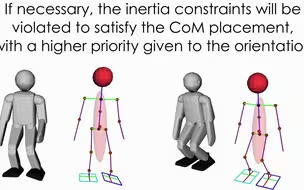
具有惯性约束的仿人机器人快速全身运动控制(搬运)
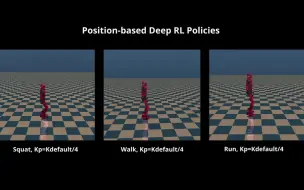
Torque-based Deep RL for Task-and-Robot Agnostic Learning(搬运)
外网真实评论:工厂内对宇树科技Go1机器狗进行大规模测试
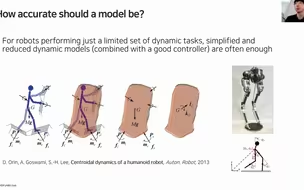
Taeyoon Lee 基于动态模型的机器人的几何方法(搬)
[搬] Factorized Motion Diffusion 实现精确且与角色无关的运动插入视频
开源控制器Baselinewalkingcontroller:双足机器人平地动态行走
6轴机械臂运动学正逆解验证程序,三连留邮箱
Bipedal Humanoid Robot Self Balance System (搬运)
ICRA 2022 - Provably Safe RL for Manipulation next to Humans-ldvWMJVBLa0
从人类到仿人机器人的稳健实时全身运动重定向 - 快速且具有挑战性(搬)
Provably Stabilizing Controller for Quadrupedal Robot on Dynamic Rigid Platforms
WBC-based Walking in place experiments simulation (搬)
[搬] 在线 DNN 驱动的非线性 MPC,用于步幅调节的仿人机器人步行
【日常】Dummy机械臂结构件修改进行中~
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
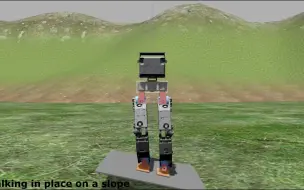
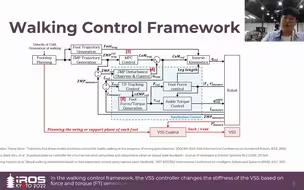
[IROS 2022] Walking Control Framework on Uneven Terrain using VSS(搬运)
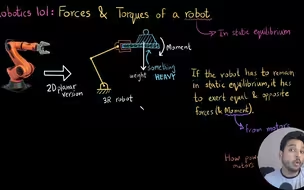
Forces & Torques of a robot _ Robotics 101(搬)
Forces & Torques of a robot (part 2) _ Robotics 101(搬)
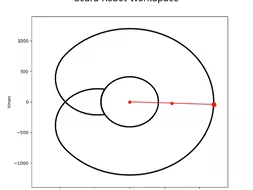
Scara 机器人工作空间(Robot WorkSpace)