V
主页
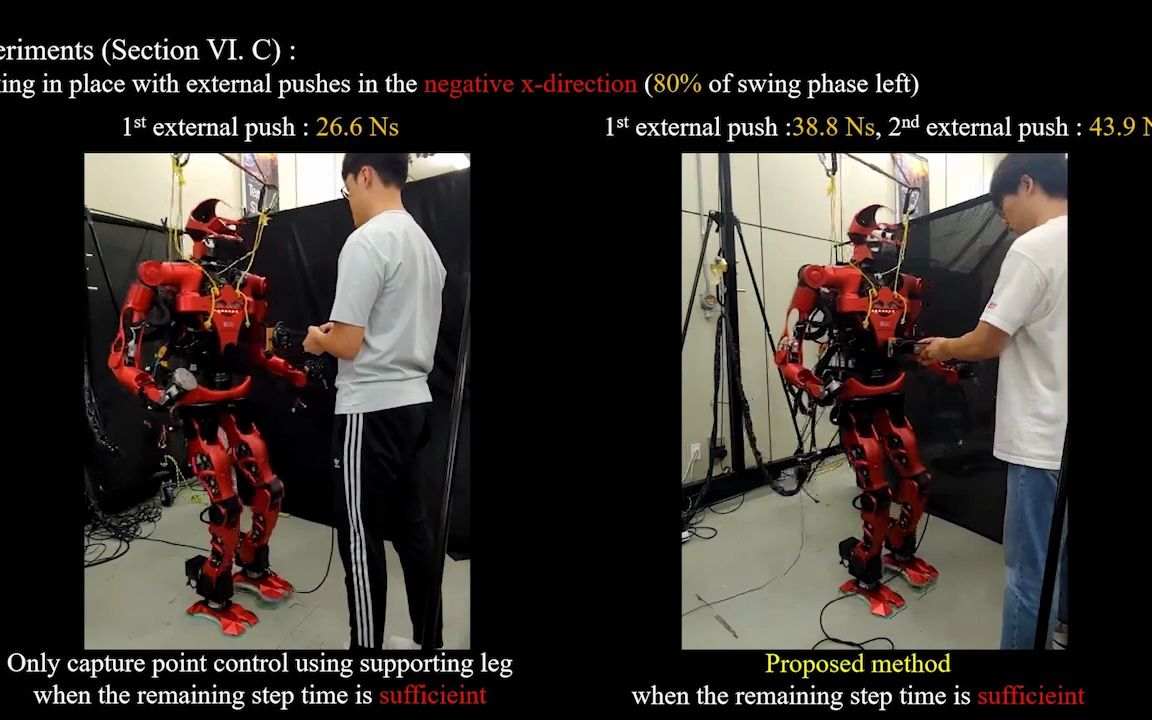
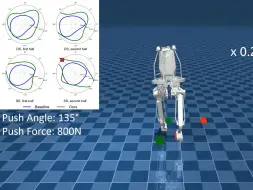
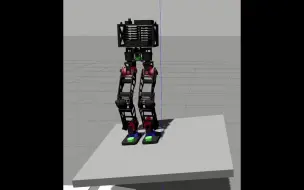
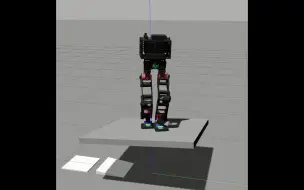
基于捕获点控制的双足支撑时间调整的仿人踏步算法(搬运)
发布人
https://www.youtube.com/watch?v=PYtCBtyY9po [ICRA2023] Foot Stepping Algorithm of Humanoids with Double Support Time Adjustment based on Capture Point Control - Kim Myeongju - www.linkedin.com/in/myeong-ju-kim-1a019b247 https://www.icra2023.org/ Dynamic Robotic Systems Lab. http://dyros.snu.ac.kr/ Seoul National University Graduate School of Convergence Science and Technology (GSCST) Professor Jaeheung Park
打开封面
下载高清视频
观看高清视频
视频下载器
使用惯性信息估计有腿机器人的概率接触状态(搬运)
基于质心动量的人形推动恢复(搬)
Humanoid Balance Control using Centroidal Angular Momentum based on HQP(搬运)
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
具有链接灵活性的双足机器人的扭矩控制运动(搬)
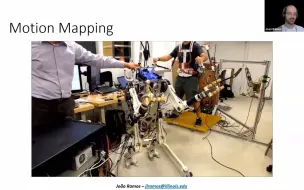
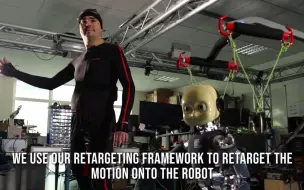
从人类到仿人机器人的稳健实时全身运动重定向 - 快速且具有挑战性(搬)
THOR Push Recovery Jan 27, 2014(搬运)
[搬] 双足机器人自主实现开门通过类人行为-Nadia
[搬] 通过 3D SLIP+足部动力学实现高度机动的人形跑步
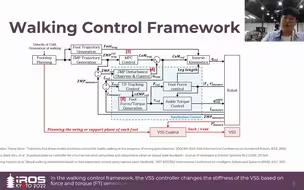
[IROS 2022] Walking Control Framework on Uneven Terrain using VSS(搬运)
[搬] 在线 DNN 驱动的非线性 MPC,用于步幅调节的仿人机器人步行
通过可微分物理引擎传输控制电缆驱动机器人(搬运)
WBC-based Up & Down Motion in a Single Foot Stance, #2, (23.06.02) (搬)
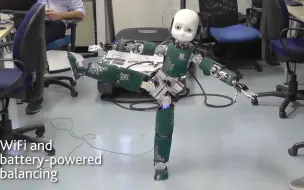
iCub dynamic balancing and walking 2018(搬运)
过动态交互的双边反馈远程操作类人机器人(搬)
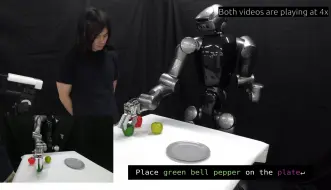
[搬] 人形机器人 Torobo 的语言调节自主拾取和放置演示
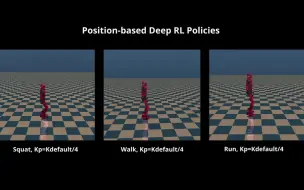
Torque-based Deep RL for Task-and-Robot Agnostic Learning(搬运)
[搬] 高比率谐波传动摩擦建模的物理知识学习 (机翻)
Vision-Based Terrain-Aware Locomotion for Legged Robots (T-RO) (搬)
通过运动重定向学习控制人形机器人的任务优先级和收益(搬)
SUBO 2 Upgrade Balance Control & Disturbance Test (搬运)
一种骑在两轮移动平台上的力矩控制仿人机器人(搬)
Bipedal Humanoid Robot Self Balance System (搬运)
通过深度学习加快基于优化的运动规划速度(搬)
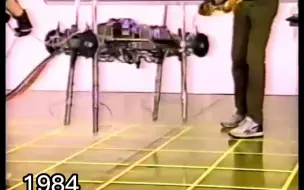
BigDog 发展史1984-2022(搬运)
SUBO-2 Balance Control at 10 Degree Slope (搬运)
Learning to Plan for Human-Robot Cooperative Carrying ICRA 2023(搬运)
Taeyoon Lee 基于动态模型的机器人的几何方法(搬)
ICRA 2022 - Provably Safe RL for Manipulation next to Humans-ldvWMJVBLa0
开源控制器Baselinewalkingcontroller:双足机器人平地动态行走
8万元的双足机器人,走路姿势“不正经”
PyBullet 中的人形动作捕捉回放(搬)
通过分布式优化多肢机器人进行接触丰富的抓取和运动(搬)
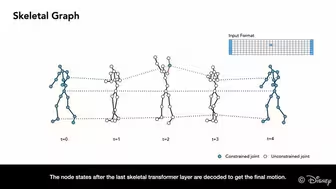
[搬] 直观神经运动创作的骨架中间件 (机翻)
[自制]手搓双足机器人样机demo|model-based控制|落后轻喷
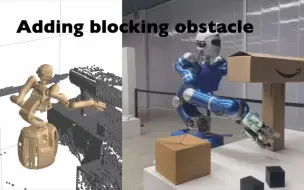
杂乱环境中的腿式机器人(搬)legged robot in cluttered environment
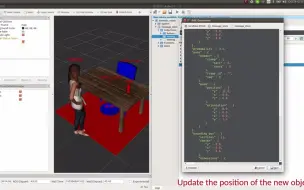
Rviz对象可视化器演示(搬)
控制……囚禁
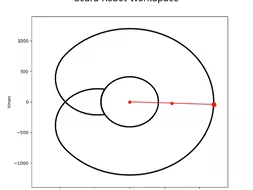
Scara 机器人工作空间(Robot WorkSpace)
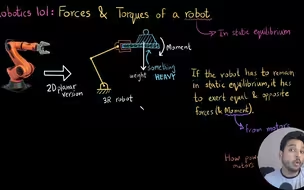
Forces & Torques of a robot _ Robotics 101(搬)