V
主页
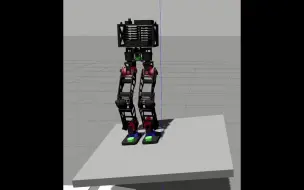
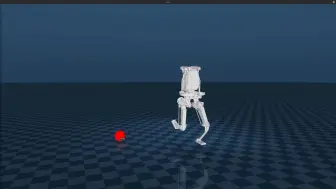
[IROS 2022] Walking Control Framework on Uneven Terrain using VSS(搬运)
发布人
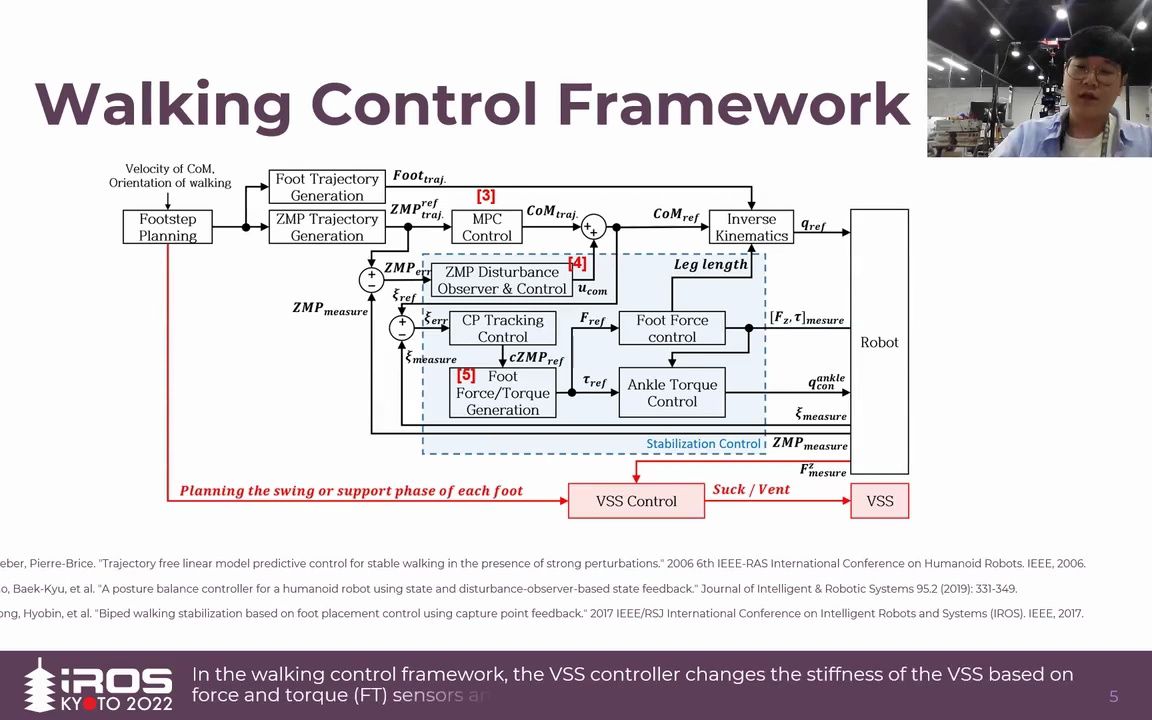
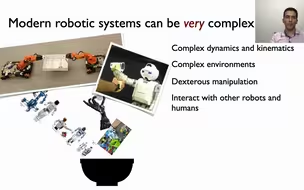
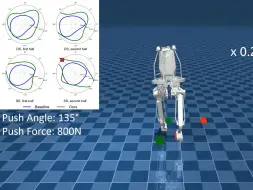
https://www.youtube.com/watch?v=mMqNBPpF3uU [IROS 2022] Walking Control Framework on Uneven Terrain using Variable Stiffness Sole (VSS) Authors : Yun-Ho Han, Junyeon Namgung, Baek-Kyu Cho*
打开封面
下载高清视频
观看高清视频
视频下载器
基于质心动量的人形推动恢复(搬)
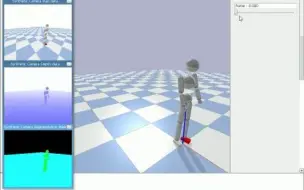
Humanoid Balance Control using Centroidal Angular Momentum based on HQP(搬运)
WBC-based Walking in place experiments simulation (搬)
基于线性化双倒立摆的仿人机器人推送恢复 (搬运)
[搬] 基于柔顺性优化的刚软混合系统类人机器人运动控制
THOR Push Recovery Jan 27, 2014(搬运)
ICRA 2023 Hopping Robot with MPC (搬运)
使用具有控制屏障功能的全身控制的人形自碰撞避免(搬)
基于捕获点控制的双足支撑时间调整的仿人踏步算法(搬运)
SUBO-2 Balance Control at 10 Degree Slope (搬运)
具有链接灵活性的双足机器人的扭矩控制运动(搬)
BigDog 发展史1984-2022(搬运)
复杂的机器人系统:使用对偶四元数代数建模、控制和规划
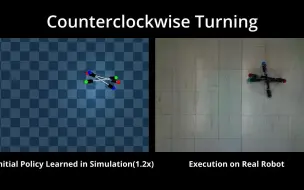
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
[搬] 双足机器人自主实现开门通过类人行为-Nadia
(搬运) Learning to Walk and Fly with Adversarial Motion Priors (IROS 2024)
使用惯性信息估计有腿机器人的概率接触状态(搬运)
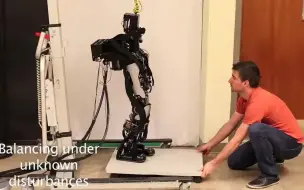
SUBO 2 Upgrade Balance Control & Disturbance Test (搬运)
WBC-based Up & Down Motion in a Single Foot Stance, #2, (23.06.02) (搬)
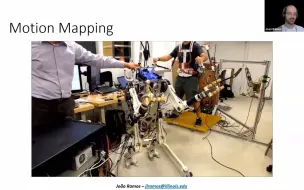
从人类到仿人机器人的稳健实时全身运动重定向 - 快速且具有挑战性(搬)
具有分层逆动力学的扭矩控制类人动物的平衡实验 2014(搬运)
Vision-Based Terrain-Aware Locomotion for Legged Robots (T-RO) (搬)
[搬] 利用实时非线性 MPC 的双足运动Seamless反应策略
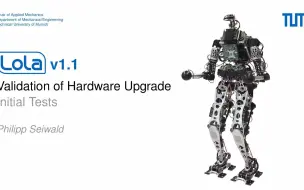
Humanoid Robot LOLA v1.1 - 硬件升级验证 - 初始测试 (搬)
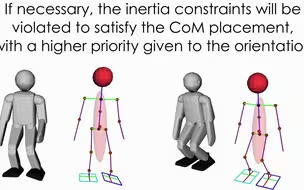
具有惯性约束的仿人机器人快速全身运动控制(搬运)
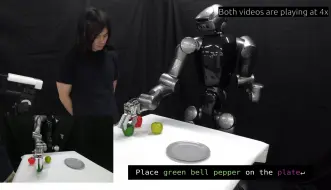
[搬] 人形机器人 Torobo 的语言调节自主拾取和放置演示
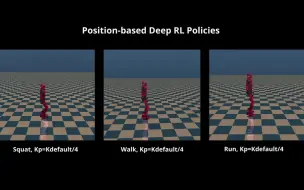
Torque-based Deep RL for Task-and-Robot Agnostic Learning(搬运)
过动态交互的双边反馈远程操作类人机器人(搬)
Bipedal Humanoid Robot Self Balance System (搬运)
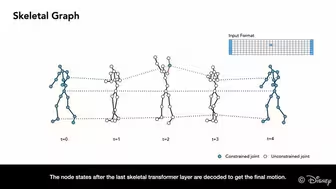
[搬] 直观神经运动创作的骨架中间件 (机翻)
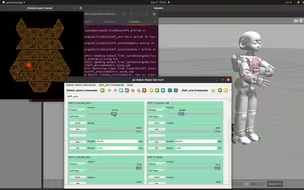
PyBullet 中的人形动作捕捉回放(搬)
Forces & Torques of a robot (part 2) _ Robotics 101(搬)
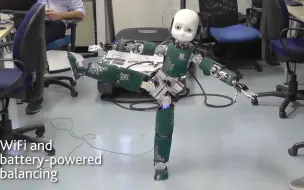
iCub dynamic balancing and walking 2018(搬运)
Enhanced Balance for Legged Robots Using Reaction Wheels (搬运)
杂乱环境中的腿式机器人(搬)legged robot in cluttered environment
[搬] 通过 3D SLIP+足部动力学实现高度机动的人形跑步
通过可微分物理引擎传输控制电缆驱动机器人(搬运)
[搬] 高比率谐波传动摩擦建模的物理知识学习 (机翻)
一种骑在两轮移动平台上的力矩控制仿人机器人(搬)
iCub Gazebo - Skin emulation (v2) (搬)