V
主页
普林斯顿 IRoM 机器人研究 —— 自信感知: 基于学习的感知为导航提供安全保证(2024 开源)
发布人
感知技术的飞速发展使得大型预训练模型可以开箱即用,将对世界的高维、嘈杂和片面观察处理成丰富的几何表征(如占用预测)。然而,由于在陌生环境中缺乏可靠的性能,将这些模型安全地集成到机器人上仍然具有挑战性。在这项工作中,我们提出了一个框架,用于严格量化用于占位预测的预训练感知模型的不确定性,从而为导航提供端到端的统计安全保证。我们以保形预测技术为基础,建立了一个校准感知系统,该系统可轻松处理预训练模型的输出,同时确保对新环境的泛化,以及在感知输出与规划器结合使用时对状态分布变化的稳健性。经过校准的系统可与任何安全规划器结合使用,以用户指定的阈值 1-epsilon 为新环境中的安全性提供端到端的统计保证。我们通过仿真实验和硬件实验对由此产生的方法(我们称之为 "信心感知"(PwC))进行了评估,实验中,一个四足机器人在室内环境中穿行,其中包含了在训练或校准过程中未见过的物体。这些实验验证了 PwC 提供的安全保证,并证明与基线相比,经验安全率有显著提高。
打开封面
下载高清视频
观看高清视频
视频下载器
MuJoCo 苍蝇仿真 Jupyter Notebook
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
第三组 路径规划算法(2024年)
CMU 机器人讲座 —— 构建适应性强的通用机器人
宾大 GRASP 讲座 —— 机器人中的具身人工智能
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
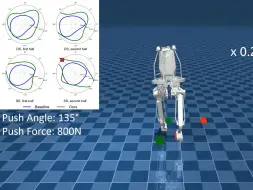
RoMI Lab 研究 —— 通过全身 MPC 和最优区域选择实现感知运动
IEEE 机器人讲座 —— MuJoCo MPC (MJPC)介绍
Go2开发教学11-ROS2 服务接口
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
MuJoCo MPC 应用示例:人形机器人跟踪
保姆级手把手IsaacLab安装教程
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
CMU 机器人讲座 —— 面向大规模多智能体的智能规划(移动机器人,无人机)
CMU 最优控制 2024 助教补充 第 7 讲
斯坦福机器人讲座 —— 机器人技能获取: 策略表示和数据生成
厂长:因为颜值太帅,暴露了,被神秘大佬提醒了。比亚迪人形机器人电池太牛逼了。(熬夜录屏不易,麻烦点关注点赞投个币)
CMU 机器人讲座 —— Where's RobotGPT
【新游戏电台】QA特别篇:专访温铁军,温老师如何看美国总统大选,数字货币,人工智能等时事热点问题
乐高积木:使用乐高建造不同种类的机器人,并让他们展开对决
强推!2024年最适合初学者入门学习的《机器学习+深度学习+强化学习》上海交大和腾讯强强联合打造!太全面了!
2024 CeMAT亚洲物流展有哪些亮点?透露出怎样的行业趋势?
四足机器人首次参加马拉松
吹爆!不愧是李宏毅老师!2024公认最详细的【强化学习教程】通俗易懂!导师不教你的,李宏毅老师亲自教你,这还不赶紧学起来!!!人工智能|强化学习|机器学习
USC 2024 机器人基础 第 17 讲 基于采样的运动规划 I
TCOptRob 研讨会: 非线性模型预测控制的数值优化
多传感器融合三维重建
听说听懂的人已经疯了,量子纠缠的真相竟是世界是虚拟的
佐治亚理工学院研究 —— 人体动捕训练四足机器人(类人动作,如打网球)
COIN-LIO:互补强度增强型激光雷达惯性测距仪(ICRA 2024)
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym
四足机器人 ANYmal 的应用 —— 芬兰检测核安全
RLChina 2024 | 3小时强化学习入门课程-下
CMU 最优控制 2024 第 17 讲 迭代学习控制(Iterative Learning Control)
一个很变态......但可以光速学会人工智能基础的神奇方法!B站强推,少走99%的弯路,资深大佬花费256小时整理的2024最全面人工智能教程!
NVIDIA 软硬件开发的人形机器人(From AVs to Humanoids)
MATLAB - Learning-Based Control(基于学习的控制) 官方出品
实时最优控制讲座 —— Crocoddyl 教程