V
主页
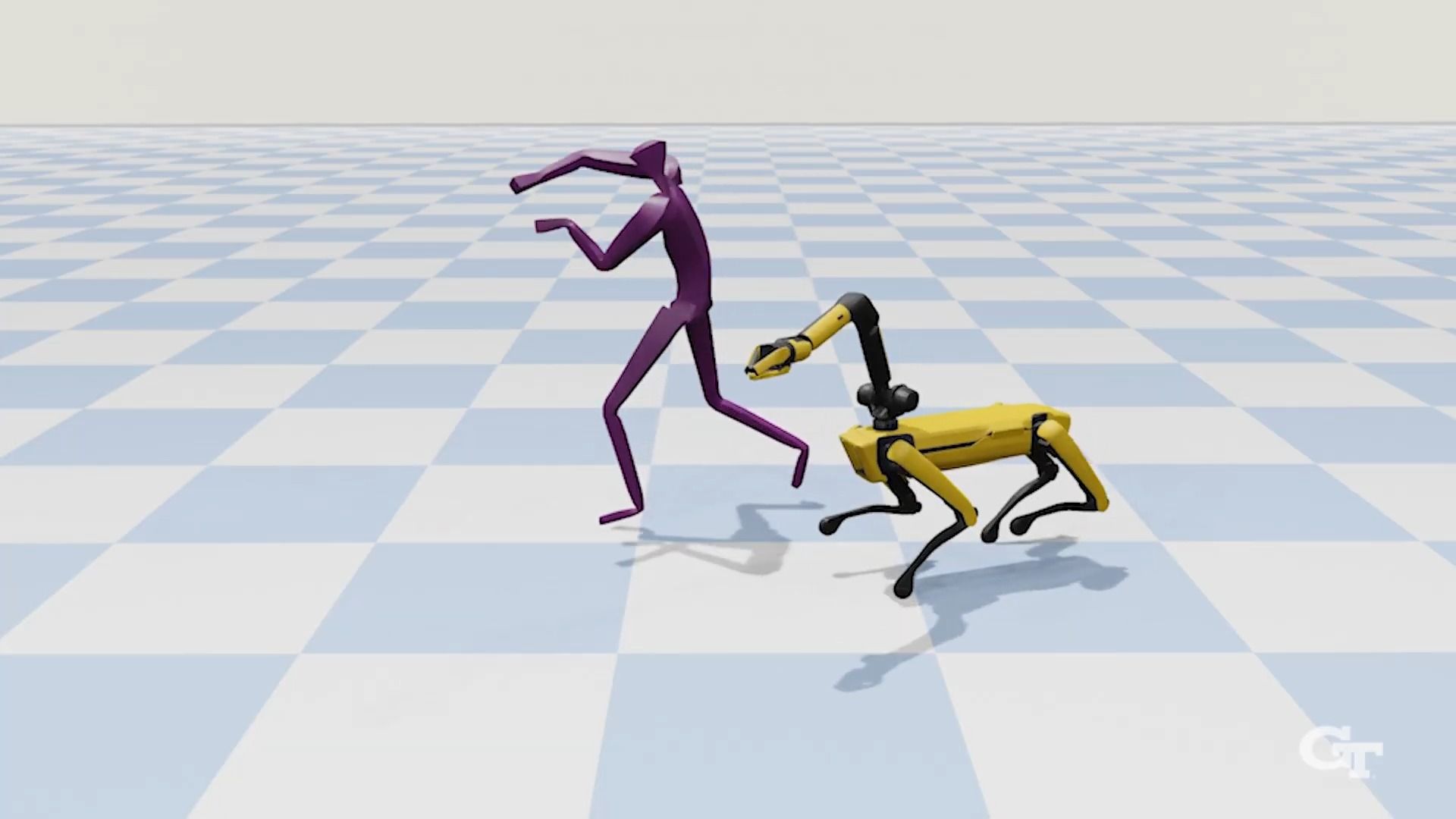
佐治亚理工学院研究 —— 人体动捕训练四足机器人(类人动作,如打网球)
发布人
佐治亚理工学院的研究人员利用人体动作捕捉数据来训练四足机器人复制类人动作,这是机器人领域的一项革命性新进展。
打开封面
下载高清视频
观看高清视频
视频下载器
ETHZ 研究:RL + 基于模型的控制: 利用按需最优控制学习灵活四足运动
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
ETHZ 四足机器人研究 —— 利用 3D 表征 学习在狭窄空间行走
实时最优控制讲座 —— 最优控制机器人软件
ETH + NVIDIA 研究 —— Orbit: 交互式机器人学习环境的统一仿真框架
ICRA 2019 轮式四足机器人的全身运动控制与规划
苏黎世联邦理工学院 圣诞老人联合 ANYmal 大战实验室恶霸: 在 RSL 进行节日对决!eth 苏黎世联邦理工学院 四足机器人
鸟类和变形翼无人机的灵活栖息动作 | 2024 洛桑联邦理工大学
实时最优控制讲座 —— 从航空航天的角度
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym!
波士顿动力 Predictably Spot-On Industrial Inspection Boston Dynamics
MuJoCo 人形机器人&四足机器人仿真一览
实时最优控制讲座 —— Crocoddyl 教程
EPFL 机器人研究 —— 视觉CPG-RL: 学习视觉引导的四足机器人运动CPG(ICRA 2024)
迪士尼研究 —— 鲁棒神经运动控制器的轨迹增强
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
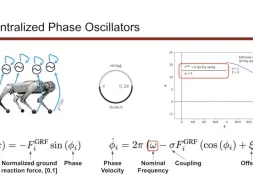
ICRA 2024 - Learning Emergent Gaits with Decentralized Phase Oscillators
类 Sora 机器人基础模型 RFM-1:理解物理的世界模型
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
CMU 机器人讲座 —— 构建适应性强的通用机器人
波士顿动力 Atlas 应用 —— 手持消防水带穿过舱门
[PongBot-W] Exploring Campus with Wheeled Quadruped Robot
机器人讲座 —— 大行为模型 - 基于监督学习的机器人灵巧操作
UIUC 机器人讲座 —— 机器人学习:通过理解第一视角视频(Robot Learning by Understanding Egocentric Video)
ETH研究 —— 利用纳米无人机群进行分布式测绘的全机载 SLAM
MIT 机器人研究 —— 机器人灵巧操作
开源 机器人操作数据集 —— DROID: 大规模机器人操作数据集
实时最优控制讲座 —— 改变接触条件下的轨迹优化
实时最优控制讲座 —— OCS2 教程
废墟中逃生的四足狗
普林斯顿机器人讲座 Russ Tedrake - 采用扩散策略的灵巧操作
RoMI Lab 研究 —— 通过全身 MPC 和最优区域选择实现感知运动
斯坦福大学研究 - 用于机械手设计的动力学扩散模型
量产“牛马”的时代已经到来,廉价劳动力将供不应求…
密歇根大学机器人讲座 —— 动力学和控制学习的一些基本限制
CoRL 机器人讲座 —— 通向通用机器人之路
足式运动和操作的实时最优控制 - Marco Hutter
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
ICRA 2024 全部论文及下载方式
教程:使用 CVXPY 进行凸优化 - SciPy 2022