V
主页
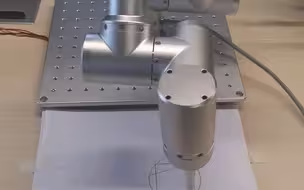
新鲜出炉的小六轴机械臂拖动示教,总成本几千元,六个伺服电机,效果出奇的好
发布人
总线通信周期8ms,通信周期大于20mm会明显抖动,电机的PI参数要设大,否则没有刚性,精度会变差,另外底座固定也很重要,不要忽视
打开封面
下载高清视频
观看高清视频
视频下载器
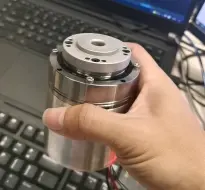
中空谐波一体化伺服关节
开源6自由度机械臂
Ros2控制6轴机械臂,目前完成gazebo 仿真测试
一体化伺服关节-行星版
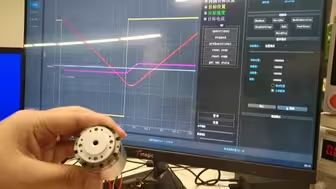
看一下滤波器对伺服FOC性能的影响
FOC速度环波动
工创赛:你还不会设计齿轮?
使用yolov8识别+深度相机+机械臂实现垃圾分拣机械臂
FPGA实现FOC驱动,高性能,低成本
使用Isaac Sim+ROS2初步实现机械臂的Sim2Real
松下750w伺服电机会回转的原因竖版
我在用低代码玩机械臂
人形机器人 全身关节电机
PiPER机械臂版ALOHA,让它帮你做家务~
自制SCARA四轴机械臂,低成本3D打印,全闭环控制
80元成本的机械臂
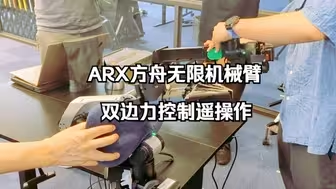
ARX方舟无限机械臂 双边力控遥操作
Nature | 颠覆传统设计!电动液压肌肉骨骼机器人腿,实现真正意义上的灵活、强适应性的且节能运动!
9800的协作机器人运行效果
造一台类似特斯拉的机器人
人形机器人腿部结构 基于 4DoF 球面并联机构
Aloha机械臂标准模型控制器Python库函数快速上手
伺服foc的低速性能
食品码垛机器人,智能码垛机器人,工业机械臂,智能输送线。
PACC:一种使用 MPC 与四足机器人进行高负载协作搬运的被动臂方法
客户案例 | 基于松灵RANGER MINI 3.0底盘的双臂升降式具身智能平台的无限可能
世界上最大负载的机械臂
机械臂数字孪生 | 智慧工业实操 3D 可视化 | 图扑软件
搜维尔科技:OptiTrack将捕捉到的人类动作数据映射到人形机器人的各个关节上进行遥操作
行星版一体化伺服关节-硬件连线和上位机演示
能看见,能听懂,能自主操作的机械臂
机器人技术 | 6 轴测试
机械臂自适应导纳恒力按摩,姿态顺应曲面
桌面机械臂移动抓取 教学测试
2025年中国大学生工程实践与创新能力大赛,机械臂从虚拟到现实了
人形双臂机器人关机测试
伺服选大了
最小的机器人关节
PLC编程零基础入门
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制