V
主页
京东 11.11 红包
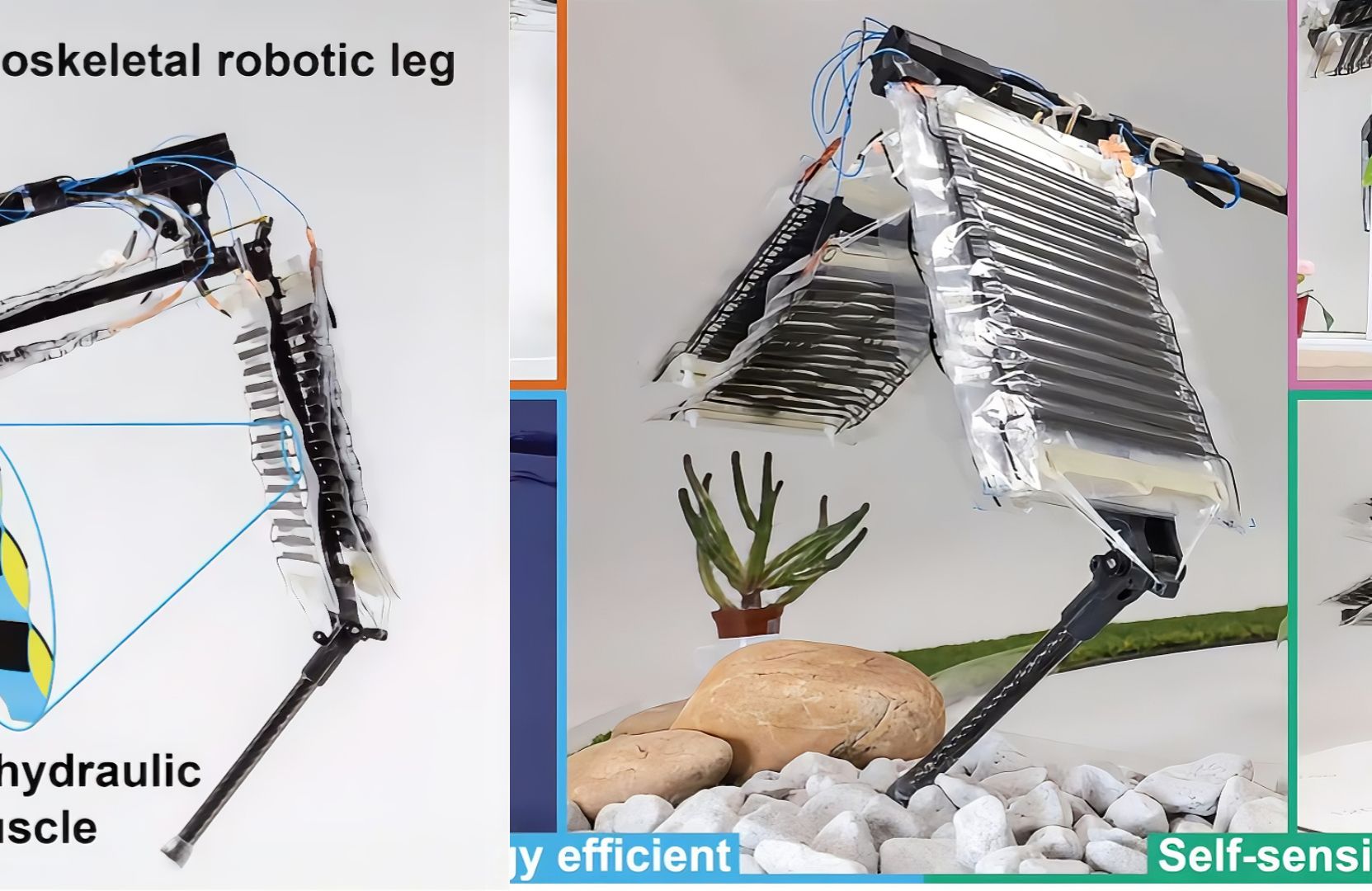
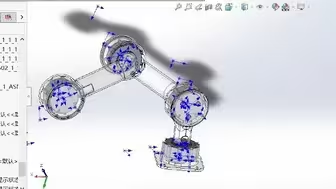
Nature | 颠覆传统设计!电动液压肌肉骨骼机器人腿,实现真正意义上的灵活、强适应性的且节能运动!
发布人
苏黎世联邦理工学院的研究人员开发出一种名为PELE的电液压机器人腿。这种机器人腿模仿生物肌肉骨骼结构,由拮抗对电液压人工肌肉驱动,具有高灵活性、适应性和能源效率。PELE能在多种地形上自适应跳跃,且在保持姿势时几乎不消耗能量。这项研究不仅展示了机器人腿的卓越性能,还为未来机器人设计提供了新方向,有望使机器人更好地适应复杂环境并提高能效。 标题:Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion 链接:https://www.nature.com/articles/s41467-024-51568-3
打开封面
下载高清视频
观看高清视频
视频下载器
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
如何用706.9元做一个高精度的机械臂?
IROS'24 普渡大学、麻省理工学院 | 5自由度触觉夹持器,性能匹敌仿生手,实现高效精确操控
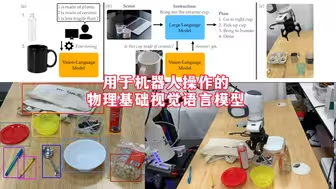
3.96万条众包和41.7万条自动化 的物理概念标注,助力VLMs突破 让机器人像人类一样理解物理世界
把机械臂安装到无人机上……灵活到可怕!
刚刚Clone重磅推出全球首款仿生机器人躯干,和绝大多数机器人采用的钢铁结构不同,他采用的非金属1:1高仿真结构设计,可能这种方式才是设计机器人伴侣的最佳途径!
NeurIPS'24 | DHD: 多无人机协同感知框架,提升 目标轨迹预测的准确性和全面性
scratch创意编程人工智能机械臂机器人
IROS’24 Oral开源 | CGDenoiser撕破夜幕的噪声迷雾,提升无人机夜间追踪精度
英伟达黄仁勋再放大招,三大工具颠覆机器人的训练和开发,物理人工智能时代已到来!
它颠覆了传统编程
多传感器融合感知
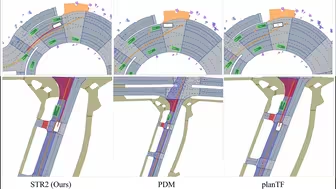
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
《机器人触觉与灵巧操作入门》全网首门机器触觉系统性课程 灵巧手| 入门教学【课程试看】
手搓Aloha机械臂训练
【盘绕柔性触手】有感官反馈能抓取本身220倍重物!
有小伙伴说让我把机械臂速度调快一点、安排
Science Robotics封面 | 当机器人学会用'快照'导航, 轻重量小内存实现'长途跋涉'
RSS'24满分论文 | ATM框架 无需大量标注,让机器人 从视频学习变得简单高效
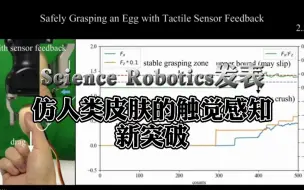
突破!《Science Robotics》:机器人触觉传感器的自解耦和超分辨率
遥操作孪生协作臂
机械臂挑战中华的古老神秘力量“抖空竹”!
机械臂代码讲解-02
懒人福音!为家政机器人装配万能机械手!
3D打印六轴机械臂,历经5个月终于做好了。
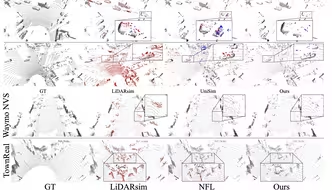
CVPR'24 Highlight 开源,DyNFL:使用NeRF对动态激光雷达场景仿真
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
宇树G1机器人VS波士顿Atlas机器人,你觉得哪一个设计的相对更完美呢?
第一次玩机械臂
登上Nature!AI²BMD以量子级精度推进蛋白质动力学
智在臂得,3D深度视觉机械臂轻松搞定三维空间环境感知,体积测算、空间抓取,简直超酷!
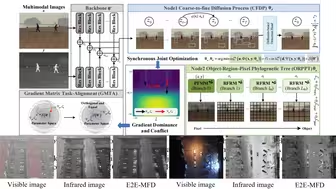
NeurlPS 2024 Oral | E2E-MFD 迈向端到端同步多模态融合检测 为智驾实现同步优化与性能提升
第五步-机械臂设计
智能组装|机器人非平面多角度3D打印
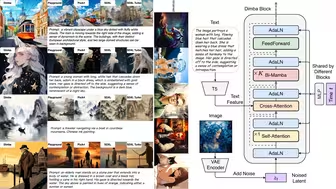
Dimba模型:融合Transformer与Mamba技术,灵活地平衡吞吐量和内存需求,并生成更高质量的图像
投棒球演示的机器人Torobo
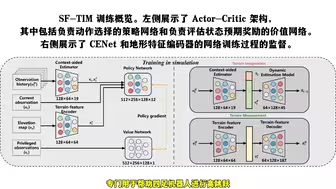
成功部署,敏捷度直接翻倍!浙大提出辅助四足机器人的跳跃新框架SF-TIM,敏捷度直接翻倍
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
NeurlPS'24 开源 | 使用VoxSplats 进行即时大规模场景重建,仅用3张 图像就可在20秒内重建百米大场景
盘点那些有趣的桌面机械臂10