V
主页
FMCW 雷达信号调制原理介绍
发布人
https://www.youtube.com/watch?v=XvZR9qA9mKc
打开封面
下载高清视频
观看高清视频
视频下载器
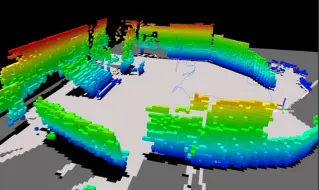
车载激光雷达:从原理到应用
激光雷达工作原理解读
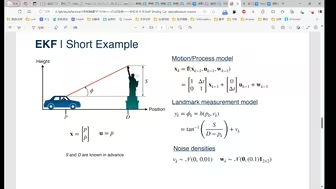
【多伦多大学—自动驾驶课程】状态估计与定位(卡尔曼滤波3):雅可比矩阵,扩展卡尔曼滤波EKF, 示例
水平集_杜克大学(中文讲解版)
优化的总体思想
Yolov8结构解析
Yolov8源码解析(一):网络结构解析
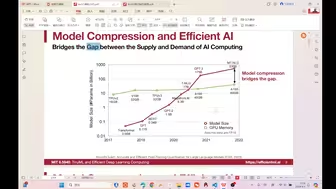
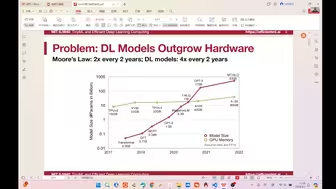
【MIT的模型压缩与优化课程】1.0课程介绍与引入——DL在视觉上的应用
【MIT的模型压缩与优化课程】2.0神经网络基础——常见的各种算子
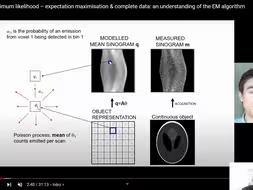
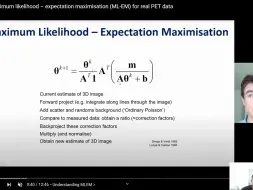
18详解MLEM算法
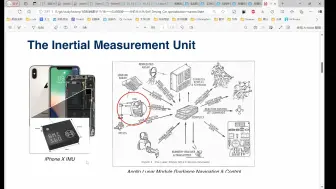
【多伦多大学—自动驾驶课程】GPS和INS系统2:IMU中的陀螺仪和加速度计
【杜克大学——图像与视频处理】P6_人类视觉系统
混淆矩阵怎么看?
深度学习增强与去噪
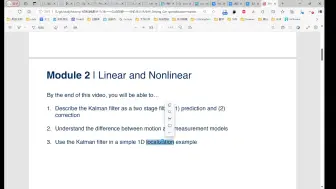
【多伦多大学—自动驾驶课程】状态估计与定位(卡尔曼滤波1):算法原理,示例
计算机视觉与图形学的区别
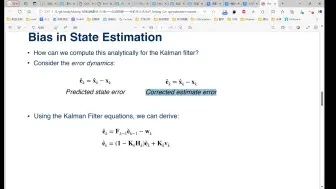
【多伦多大学—自动驾驶课程】状态估计与定位(卡尔曼滤波2):无偏性,一致性,最好的线性无偏估计
计算机视觉与SLAM的区别
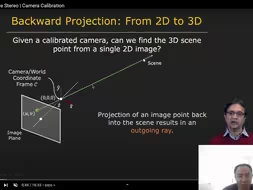
【哥伦比亚大学CV课程】011校正的立体视觉——1相机模型与内外参矩阵
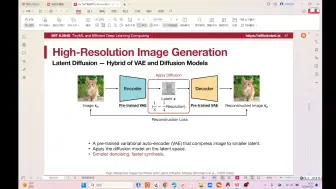
【MIT的模型压缩与优化课程】16.2DiffusionModel——StableDiffusion和图像编辑和FastComposer
【哥伦比亚大学CV课程】005图像感知——5相机响应函数与HDR模式
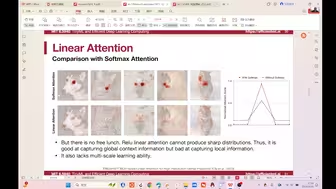
【MIT的模型压缩与优化课程】14.2EfficientVit——线性Attention和SparseVit
【德国图宾根大学-自动驾驶课程】道路分割与车道检测——2道路分割
【MIT的模型压缩与优化课程】1.1课程介绍与引入——DL在NLP上的应用
【哥伦比亚大学CV课程】011校正的立体视觉——4双目视觉系统
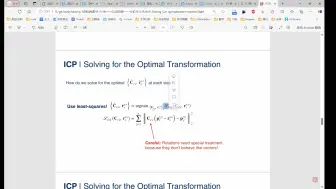
Lidar感知3:ICP算法的原理,ICP算法的变体
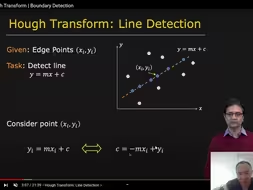
【哥伦比亚大学CV课程】014边缘检测——3霍夫变换检测直线和圆
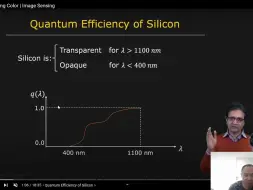
【哥伦比亚大学CV课程】005图像感知——4颜色感知:量子效率,人眼感光细胞,Bayer模式
【MIT的模型压缩与优化课程】3.0剪枝与稀疏性——剪枝粒度与剪枝准则
7最小二乘的BPF重建
17MLEM算法的可视化与OSEM算法
【德国图宾根大学-自动驾驶课程】里程计与SLAM——2VO:间接法与小孔成像原理
【德国图宾根大学-自动驾驶课程】重建与运动——2立体视觉匹配与深度图
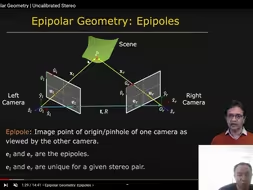
【哥伦比亚大学CV课程】012未校正的立体视觉——2对极几何约束
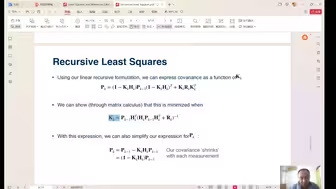
【多伦多大学—自动驾驶课程】状态估计与定位(最小二乘法):3递归最小二乘法
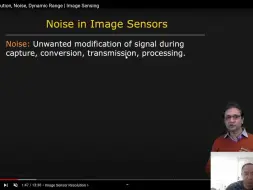
【哥伦比亚大学CV课程】005图像感知——3传感器的分辨率_噪声类型_动态范围
【哥伦比亚大学CV课程】016图像分割——1基于聚类的分割
ACM模型-Snake模型(中文讲解版)
11迭代重建与系统建模
【多伦多大学—自动驾驶课程】GPS和INS系统1:3D几何与常见的参考系