V
主页
超高速PCle EtherCAT控制卡PCIE464M,即刻提升高速高精智能装备生产力!
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
国产最优性价比的4轴网络式运动控制卡,出色的控制技术,让您的设备在自动化行业内卷中脱颖而出!
【2024CIMC大赛】初赛说明会--离散行业运动控制
全国产EtherCAT运动控制边缘控制器ZMC432H
【2024CIMC大赛】初赛说明会--智能装备设计与数字孪生制造
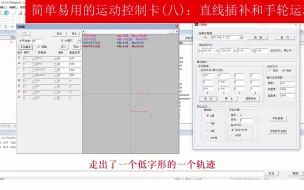
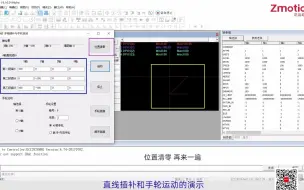
简单易用的运动控制卡(八):直线插补和手轮运动
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发之驱动安装
【运动控制+机器视觉Demo软件框架系统概述】实训平台调试视频
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(二):EtherCAT总线初始化
3、离散行业运动控制:2023比赛复盘及细节讲解
EtherCAT运动控制器在UVW对位平台中的应用
1、离散行业运动控制:设备组态
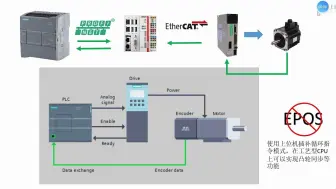
西门子PLC实现模拟量运动伺服功能与EtherCat伺服驱动器控制
x86平台实时Windows机器视觉EtherCAT运动控制器VPLC711
运动控制卡/运动控制器的ZCAN总线ZMIO310扩展模块使用
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(三):EtherCAT总线CSP,CSV,CST模式切换
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(六):硬件位置比较输出和编码器锁存
经济型EtherCAT运动控制器(十):EtherCAT总线初始化
简单易用的运动控制卡(五)IO配置与回零运动
正运动技术视频教程:如何进行运动控制器ZBasic程序开发?
正运动技术自主研发运动控制实时内核MotionRT7--Labview例程讲解
2、离散行业运动控制:控制面板地址、传感器地址读取
二维/三维的多轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发
【运动控制+机器视觉Demo软件框架系统概述】主界面调试视频
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(五):通过RTSys进行调试与诊断
EtherCAT运动控制卡IO动作与运动控制的同步
全国产EtherCAT运动控制边缘控制器 | 轴参数配置与单轴运动控制例程讲解
高性能PCIe EtherCAT运动控制卡 | XPCIE1032H
全国产EtherCAT运动控制边缘控制器 | Python+QT进行单轴回零运动控制开发
EtherCAT运动控制卡的多轴插补运动和手轮运动
简单易用的运动控制卡(十三):IO动作与运动控制的同步
单轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发
运动控制+机器视觉Demo软件框架(一)机械参数和配方文件的管理
正运动技术 | 企业宣传片
MotionRT7 EtherCAT协议安装视频演示
MotionRT7驱动安装视频演示
EtherCAT运动控制器的PLC编程(一) 直线插补
MotionRT7 C#项目开发
简单易用的运动控制卡(十六):螺距补偿和反向间隙补偿
简单易用的运动控制卡(七):一次性加载多条连续小线段数据