V
主页
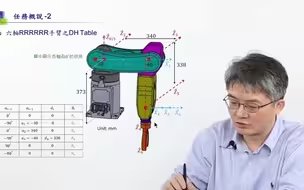
4. 机械臂集合法与DH表示法
发布人
https://www.bilibili.com/video/BV1oa4y1v7TY?p=4 视频来源:https://www.coursera.org/learn/robotics1/home 有问题可以留言, 大家一起学习交流
打开封面
下载高清视频
观看高清视频
视频下载器
5. 机械臂运动学逆解
伴侣机器人来了,这真的是中国科技界很有趣的事情!
8. 机械臂轨迹规划实例
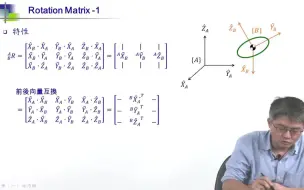
2. 旋转矩阵
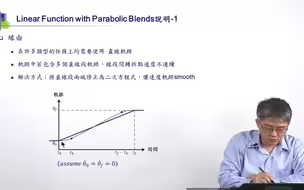
6. 机械臂轨迹规划-1
机器人公司终于来了位00后运营,领导非常放心,大家觉得怎么样?
3. 变换矩阵
电赛E题 树莓派写完的 搞了有一会 队友调的机械臂(自己打印的)纯手搓
2024 电赛E题 三子棋 努力完善中 机械臂部分
7. 机械臂轨迹规划-2
【补充】4.xv图像分析
机器生活,机器人爱上女主人,每天给女主按摩
机械臂协调控制复现
大部分打工人最终的结局,早已注定
复现Aloha算法
Arduino控制的机械臂 - 保存/回放/导出/导入动作
【逐飞科技】2024年 电赛E题 机械臂安装演示
(中英强推!)2024斯坦福最值得学习的【机器人学导论】通俗易懂秒上手!CS223A-Introduction To Robotics
Unity matlab 通信 机械臂控制
马斯克猫女机器人,女友传三代,人走她还在
当大模型遇上了机械臂
六轴机械臂控制器---示教编程和力控功能Python函数库
机械臂创意手舞!星海图超轻型力控机械臂A1现已正式发售,3.98万起!
六轴机械臂控制器---姿态及轨迹控制功能Python函数库
画个机械臂作为生日礼物送给自己
[开源了]全球最小的桌面级双轮足机器人(开源地址在视频简介)
使用自定义环境收集数据集并基于diffusion policy训练一个简单的抓取任务
机械臂的结算根本不会,求指导~电赛E题
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
ROS2版DUMMY - Dummy ROS2支持的第一步 如何创建URDF文件
2024世界人工智能大会
快速搭建QQ官方机器人!免费强大koishi+QQ开放平台。
3DMAX工业动画 机械臂的绑定和动画制作教程
机械臂视频
俺回宿舍睡觉了!让机器人自己做化学实验去~
OpenLoong机械臂遥操作测试
机械臂--开源!
【VISEL实验室】视频已打包,欢迎围观!
【全面量产】超小型RV减速器及一体化伺服驱动关节
中国深圳 双足机器人 SA01 | 价格已屠杀到3.85万元 | 机器人圈 | 还有谁能卷过中国 | 机器人 | 人工智能 | 足式机器人 | 性价比机器人 |