V
主页
京东 11.11 红包
广东省第十五届“挑战杯”大学生课外学术科技作品竞赛决赛特等奖
发布人
广东省第十五届“挑战杯”大学生课外学术科技作品竞赛决赛特等奖 基于ROS系统的高精度移动机器人室内定位 High Accuracy Mobile Robot Localization based on ROS System using Visible Light Positioning Algorithm
打开封面
下载高清视频
观看高清视频
视频下载器
基于可见光通信的智能广告灯
基于可见光通信的移动机器人室内定位与导航 (Robot Indoor Localization using Visible Light Positioning)
可见光通信应用——光二维码
基于蓝牙及可见光通信融合的光二维码
Optical Camera Communication (OCC) based on C-OOK
基于可见光通信的智能点餐系统
通过LiFi 进入6G 时代
基于micro-LED 的高速可见光通信技术
Robust Robotic Localization using Visible Light Positioning and Inertial Fusion
覆盖均匀的高容量无线光VCSEL 阵列发射机
基于FPGA的LED可见光阵列通信驱动调制模块的使用说明
照明的方向控制:照明、传感和通信的应用,
Robust Robot Localization using Visible Light Positioning based on Single LED
基于stm32的具有可见光通信功能的LED阵列
可见光通信在IOT上的应用
(with lens for further distance)Optical Camera Communication (OCC) based on C-OO
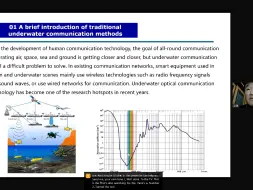
无线光通信的确定性思考
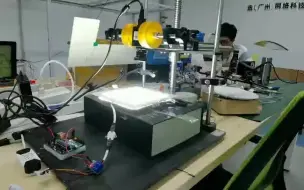
用于水下移动机器人的蓝绿LEDLD光通信设备测试
Multi-robot Cooperative Localization using Visible Light Positioning
基于ArUco Marker来估算camera的位姿
基于stereo camera的视觉里程计的实现
面向6G 的可见光通信
ego-planner复现(基于单无人机)
工业相机、事件相机、红外相机联合标定
Li-Fi实时通信产品测试
基于Augmented State EKF来实现多传感器的融合(IMU,PNP,VO)
swarm-ego-planner复现(基于多无人机)
基于可见通信的机器人与行人同时定位导航系统
IRS 辅助可见光通信
ROS无人机仿真之轨迹跟踪
基于Prometheus自主无人机开源项目的学习与仿真
davis346+dvxplorer
Event Camera Demo Introduction 1.0
视觉惯导紧融合VINS-Mono的复现
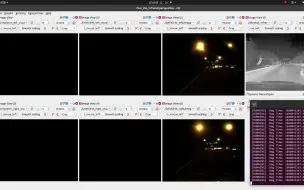
自动驾驶场景之——夜晚高速路上事件相机、红外相机、普通相机的感知情况对比
基于rgbd camera的APF路径规划
系统,AI、ML增强LiFi
(ccmslam)基于三个agents的单目SLAM地图融合
事件相机数据slider_depth可视化
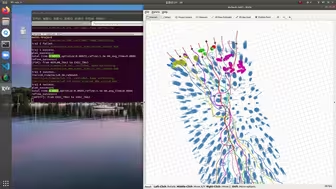
(激光雷达实时三维重建)ImMesh Testing using hku_main_building