V
主页
新型无人机正改变游戏规则
发布人
https://www.youtube.com/watch?v=m1FNcNvboSg
打开封面
下载高清视频
观看高清视频
视频下载器
从物理互动中学习结构化世界模型
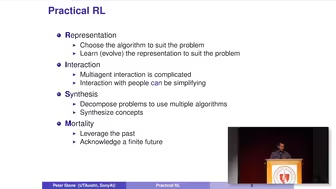
[RLC 2024] Peter Stone,实用强化学习:30 年研究的经验教训
开源通用机器人构建
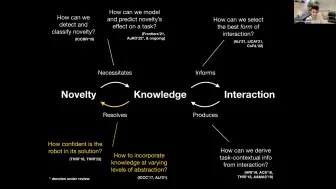
一种结构化方法来实现机器人学习泛化
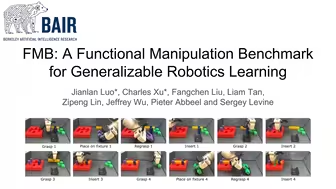
FMB:泛化机器人学习的功能性操作基准
SynH2R:合成的手-物体运动以学习人机间物体传递
EI Seminar:如何打造通用机器人
机器人可达性研究
自适应协作机器人
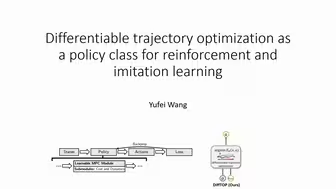
可微轨迹优化作为强化和模仿学习的策略表示
使用DRL的无人机飞行比赛
基于主动推理的复杂任务在线Pareto最优决策案例
AI提升机器人手部灵活性
足式机器人的视觉全身操控与运动
GPT-4V应用于机器人视觉语言规划
家庭通用机器人
基于自主视觉的无人机达到人类水平
通过第一人称视频进行机器人学习
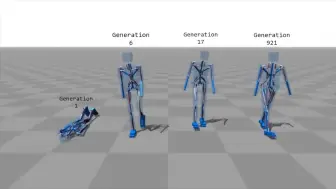
利用视频游戏模拟进化
利用声音控制开门的小工具
主动和可解释家用机器人设计
使用基础模型的low-level 具身智能
非稳态环境中的安全RL:理论与算法
陆地超级战斗机器人。
利用生物执行器机制实现软体机器人
MIT Robotics:灵活多模态机器人工具使用
现实生活中’类钢铁侠‘的机器外骨骼
构建内部摆线型机器人执行器
机器人中的数值方法
把猫咪绑在无人机上,飞天之后会是什么效果?画面太喜感了!
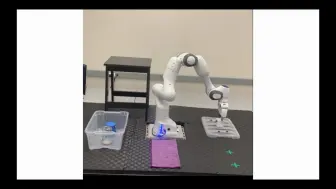
通过接触配置调整对未知物体的操作
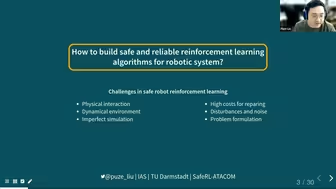
动态环境中安全可靠的机器人RL
今天把我做的这个机械臂开源
韩国无人机丑闻,简直丢人丢到家了!
[APNEET2023] 超大规模RDMA:经验和未来方向
Stanford CS25: Robotics and Imitation Learning
成为机器人专家的第一步:掌握这3个前提条件 🤖
为什么需要建立机器人学徒但不单独做?
Jim Fan 谈 Nvidia 的 Embodied AI Lab 以及老黄关于所有机器人都将实现自主预测
敏捷自适应四足机器人的分层优化控制