V
主页
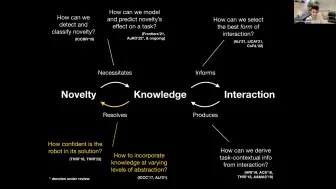
为什么需要建立机器人学徒但不单独做?
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
机器人空间感知基础
通用机器人路径思考:scaling law、数据飞轮和具身智能
自适应协作机器人
机器人学习中运动表示
神经场在机器人操作中的应用
机器人控制的不同鲁棒性观点
Stanford CS25: Robotics and Imitation Learning
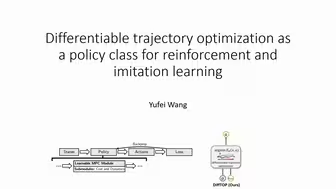
可微轨迹优化作为强化和模仿学习的策略表示
超材料类蛇直线运动机器人
机器人可达性研究
开源通用机器人构建
Google Deepmind机器人,语言到行动
新型无人机正改变游戏规则
家庭通用机器人
复杂室内外环境中的机器人导航
迈向机器人多智能体系统中大规模合作学习
复杂环境中的机器人运动
机器人中的数值方法
在安全关键系统中的不确定性规划
Princeton机器人Lecture10:动态约束下的规划
机器人学习中的收缩理论
Ameca机器人及一些讨论
智能机器人中的物理模型
数据金字塔结构管理机器人数据
AI中需要的网络和存储技术
构建内部摆线型机器人执行器
向着大型行为模型发展:通过监督学习实现多功能和灵巧的机器人
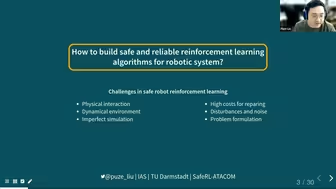
非稳态环境中的安全RL:理论与算法
动态环境中安全可靠的机器人RL
MIT Robotics:灵活多模态机器人工具使用
软体机器手的设计和制造
Real World Robotics Tutorial3:识别机器人的运动学和动力学
[CoRL2023] OOD Workshop: 如何在分布之外泛化机器人
HumanPlus:人形机器人及模仿学习
机器人泛化学习
SMUG Planner:一种适用于移动机器人在复杂环境中的安全多目标规划器
一种具身方法让机器人不惧与环境接触
利用声音控制开门的小工具
FMB:泛化机器人学习的功能性操作基准
数字实验室做机器人及模拟机器人开发