V
主页
京东 11.11 红包
自控基础2-21=开环传递函数的2种定义:必须掌握!
发布人
绘制根轨迹、绘制奈氏图和Bode图,需要用到开环传递函数。
打开封面
下载高清视频
观看高清视频
视频下载器
自控基础3-7=高阶系统的单位阶跃响应和主导极点、偶极子的概念;胡寿松自动控制原理,主导极点
自控基础4-13=分离点q1-定义及求解方程【自动控制原理基础课】【根轨迹】
现控1-23=多变量系统传递函数矩阵的定义和性质【小鱼老师控制课堂】【刘豹现代控制理论】【状态空间表达式】
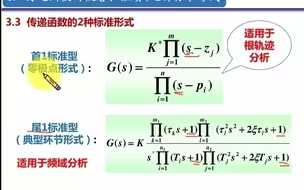
胡寿松自动控制原理,基础2-12,传递函数的2种标准型,定义和相互转换
自控基础3-14=劳斯判据的应用:零极点对消时的处理=开环稳定和闭环稳定的关系,胡寿松自动控制原理【小鱼老师控制课堂】
既然胡寿松不想说,卢京潮说的少,裴润说的有小问题,王建辉想说却没展开说,那小鱼老师就全说了吧!
自控基础3-15=误差的2种定义及其区别-HB,胡寿松自动控制原理【小鱼老师控制课堂】
上岸的学长学姐说,自控考研时,多做几遍课后题就行了,真的是这样吗?
基础4-2=开环零极点和闭环零极点之间的关系【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
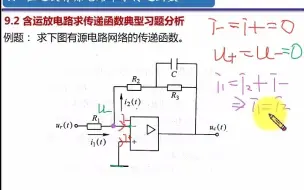
强化2-8=在运放有源电路中求解传递函数:虚短和虚断
自控基础4-18=法则6 根轨迹与虚轴交点【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
自控基础3-8=高阶系统降为低阶系统的条件-HB;胡寿松自动控制原理,主导极点
自控基础课2-17=结构图中如何判断接触?,控制工程考研,胡寿松自动控制原理
【控制考研真题讲解】北京工业大学821控制,2020年第1题讲解,有源电路级联型运放求传递函数
自控基础3-1=时域法常见的4种典型输入信号
现控1-6=建立状态空间表达式2和3=根据微分方程或传递函数【小鱼老师控制课堂】【现代控制理论】
自控基础3-9=稳定的定义和充要条件-HB;胡寿松自动控制原理,自动化考研,控制工程考研
23自动化考研试听课:基础2-6=传递函数的2种标准形式:首一标准型和尾一标准型
胡寿松自动控制原理,课后题2-9勘误,基础2-11=例题:求传递函数要注意检验是否为零初始条件
自控基础4-15=分离点q3 如何取舍分离点方程的解?【自动控制原理基础课】【根轨迹】
自控基础3-5=二阶系统4种分类对应的时间响应性能分析-HB
南京理工大学873控制,2022年第1题讲解:根据微分方程组反求系统结构图求传递函数
自控基础课2-20=双输入双输出型结构图求传递函数,用好叠加定理,胡寿松自动控制原理,控制考研
自控基础3-17=计算稳态误差的方法2:静态误差系数法-1,胡寿松自动控制原理,【小鱼老师控制课堂】
胡寿松自动控制原理,基础2-10=传递函数的定义和4个性质
基础4-22=法则8 根之和【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
自控基础3-2=时域法的3个动态性能指标和1个稳态性能指标【胡寿松自动控制原理】
利用卡西欧991cnx模式7表格功能,求解绘制Bode图的问题,注意二阶震荡环节相频表示
自动控制原理,彻底搞清2种稳态误差,第1节:按输入端和按输出端的定义及其区别!
自控基础3-16=计算稳态误差的方法1:终值定理法(万能方法),胡寿松自动控制原理【小鱼老师控制课堂】
自控基础3-18=计算稳态误差的方法2:静态误差系数法-2,胡寿松自动控制原理,【小鱼老师控制课堂】
自动控制原理考研不能使用计算器后如何应对?
基础4-20=法则7 起始角和终止角-解析式法【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
自控基础4-14=分离点q2-试根法-长除法求解多项式【自动控制原理基础课】【根轨迹】
自控基础课2-16=梅逊公式定义及在信号流图中的应用,自动化考研,胡寿松自动控制原理
自动控制原理,截止频率,剪切频率,wc的快速求解方法!
【自控技巧】禁用计算器,应该如何设计串联超前校正装置?
基础4-4=复数的基本概念-运算法则【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
基础4-1=为什么引入根轨迹?【自动控制原理基础课】【小鱼老师控制课堂】
自动化考研,自动控制原理考试大纲解读,第2章控制系统的数学模型,这章学会用梅逊增益公式求传递函数,你就过关了!