V
主页
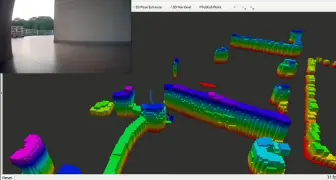
自动驾驶泊车规划
发布人
基于ros的自动驾驶泊车规划算法仿真实现
打开封面
下载高清视频
观看高清视频
视频下载器
移动机器人自主导航实车测试效果
移动机器人局部轨迹规划
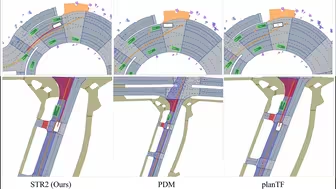
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
自动驾驶规划仿真
移动机器人轨迹优化方法模拟测试
室外智能车挑战赛—宣传视频
智能镊子
[开源]迷你停车场车牌识别收费系统
NeurIPS'24 | DHD: 多无人机协同感知框架,提升 目标轨迹预测的准确性和全面性
Neural MP - 跨任务运动规划的通用机器人控制策略
智能车的最后一舞!!!它必定是绝响!!!
轨迹优化|矩形增量膨胀安全走廊构建算法(附ROS C++/Python实现)
都给我开源吧,工创赛智能救援赛道
【小米智驾】车位到车位,起步即享智能
卓大关于智能车比赛第二十届以后发展思路,智能车一定会越办越好!希望一直办下去,让更多学生有这么宝贵的锻炼自己的平台!~
原来机器人中也有“人贩子”一个机器人拐跑一大批机器人 #智能机器人 #智能AI #离谱
20届智能车双车赛题浅浅完个赛吧!
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
挖机智能集中润滑
不要小看我们智能车小队的羁绊啊
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
“迷宫寻宝”光电小车(plus)
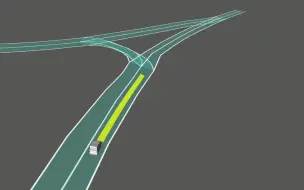
PLUTO算法详解:端到端首次超越基于规则的方法
谁能想到自动驾驶最大的威胁居然是来自人为?
笨笨,给大家打个招呼~
全屋智能安装噩梦?97% 的人都被这几个难点折磨,你知道吗?
智能车TC264硬件入门,校赛硬件入手。小白向教程 #电磁#摄像头智能车
一辆汽车,需要多少算力?自动驾驶芯片:规控算法与AI大模型
又双叒来一台A级SUV新标杆?风云T8说我挺能打|智能车指南
NEUQ智能车实验室第一届招新校赛全程录像
【去AI味保姆教程】原地起飞🚀1分钟去除文章AI味❗️
特斯拉车机如何免费追剧玩游戏
自动驾驶时代即将来临⚡️
20届智能车越野人准备好了吗🐮
新生智能车跑的再快又怎样,还不是追不上心爱的学姐
浙大Fast-Lab高飞老师 详解第二届ARTS 自主机器人技术研讨会
全面介绍Luminar Neo 1.21.2,用人工智能软件轻松编辑照片,摄影师必备工具!Luminar Neo系统教学!
第二届自主机器人技术研讨会火热报名中,19位嘉宾分享心得,与嘉宾面对面
讲座 | 自动驾驶中将轨迹和高精地图统一的环境表达方式——香港城市大学助理教授张祎凡
【桌面智能机器人】情绪反馈,语音对话,复刻成功!