V
主页
第二届自主机器人技术研讨会火热报名中,19位嘉宾分享心得,与嘉宾面对面
发布人
需要了解详细信息可在评论区或者后台留言
打开封面
下载高清视频
观看高清视频
视频下载器
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
自主机器人研讨会2024火热报名中!11月23日深圳等你来!
【走进珂学】举one反three 我们大健康机器人带给您的体验就是独one无two的
郑鼎侯俊霞工业机器人课程 从入门到精通 第1节:工业机器人的应用及发展前景
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
PLUTO算法详解:端到端首次超越基于规则的方法
自主机器人技术线上研讨会第一期:嘉宾仲星光,报告:基于隐式神经表示的LiDAR SLAM
机器人和人类比赛煎牛排(Neo 1x)
英伟达新利器fVDB:开启生成式物理智能 AI 的新时代
使用Isaac Sim和ROS2控制机器狗指南
浙大Fast-Lab高飞老师 详解第二届ARTS 自主机器人技术研讨会
宇树科技量产人形机器人
清北学子创办,自变量机器人完成亿元级融资
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
【论文分享】GR-2和何恺明具身智能首作
全球最实用 | 可以打工的人形机器人 | 特斯拉 擎天柱 | 具身智能 | 神经网络 | 人工智能 | 马斯克 |
MoveIt与Isaac Sim结合使用
NeurlPS'24开源 | RealMotion捕捉时空交互关系,为自动驾驶提供连续、精准的运动预测
NeurlPS'24 开源 | DC-Gaussian,基于3DGS的行车记录仪视频场景重建,有效去除反射遮挡
手写DiffusionPolicy【1】:最简单的机器人操作
全网最低成本—具身智能机械臂+实操课程
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
人形机器人和语言大模型导航demo
综述:自动驾驶的多智能体强化学习,旨在帮助研究人员整合多智能体强化学习技术
小鹏AI人形机器人Iron亮相:62个主动自由度,搭载自研AI芯片和灵巧手,已进厂打工!
提升四足机器人各种地形运动适应性的方法DTC(深度跟踪控制)
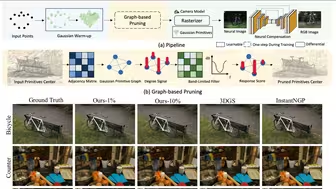
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
Swiss-Mile机器人与员工的百米赛跑
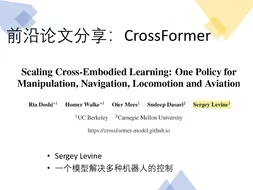
【论文分享】CrossFormer 一个模型解决多个机器人的控制 @ Sergey Levine
三分钟了解具身智能(18分钟版
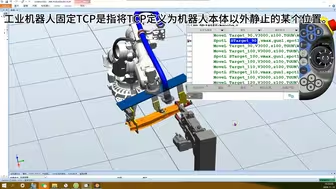
工业机器人固定TCP
开普勒正式发布人形机器人先行者K2,开启商业化进程
国产人形机器人优必选walker S vs 波士顿动力Atlas:谁是汽车工厂的优秀‘员工’?
各部门注意:收拾收拾,准备焊接!
RobotKeyframing:四足机器人学习高层次目标的运动|2024【迪士尼】
擎天柱的惊艳表现,到底是自主还是操控?#机器人 #特斯拉 #马斯克 #擎天柱 #optimus #WeRobot #机器人技术 #人形机器人
NeurlPS'24 开源 | UAV3D 无人机大规模3D感知基准 数据集助力3D目标检测与跟踪
【留学日记#253】找到机器狗站不起来的原因了(2024.7.31)