V
主页
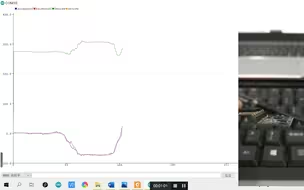
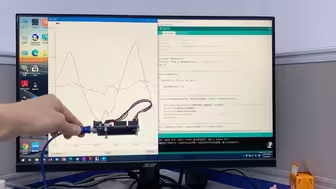
卡尔曼滤波 解算六轴数据 教程
发布人
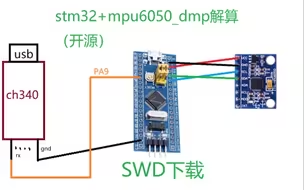
使用卡尔曼滤波解算六轴姿态角数据教程 代码写好有一段时间了,一直没有录视频,今天录一下,可能有些地方不太流畅,见谅。 如果有问题欢迎评论区讨论 开头关于加速度和陀螺仪模型的博客:https://zhuanlan.zhihu.com/p/195683958 代码和笔记:Github : https://github.com/gxt-kt/kf_6_axis 博客地址:http://gxt-kt.cn/index.php/2023/05/16/%e4%bd%bf%e7%94%a8%e5%8d%a1%e5%b0%94%e6%9b%bc%e6%bb%a4%e6%b3%a2%e8%a7%a3%e7%ae%97%e5%85%ad%e8%bd%b4%e6%95%b0%e6%8d%ae-2/
打开封面
下载高清视频
观看高清视频
视频下载器
卡尔曼Kalman滤波实例讲解:MPU6050加速度计陀螺仪数据解算与融合滤波,附代码
卡尔曼滤波从入门到实践(新年首发)
四轴飞行器-MPU6050+卡尔曼滤波
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
【Arduino】MPU6050 测欧拉角 带卡尔曼滤波 自动修正yaw角(附代码)
卡尔曼滤波,6轴姿态解算,俯仰角,翻滚角,三连+关注私信发工程
mpu6050三种常见滤波方法的对比|卡尔曼滤波、一阶互补滤波、四元数法
四元数姿态解算
【姿态解算开源】基于F4,H7扩展卡尔曼滤波和Mahony姿态解算优化工程对比-智能车,机器人等可用-开源链接在简介
stm32 DMP库姿态解算
STM32读取MPU6050角度数据
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
【软核】卡尔曼滤波,不废话
卡尔曼滤波实战之教你如何套用进自己的项目
STM32单片机培训第八阶梯:学习常用硬件模块(四)六轴陀螺仪MPU6050
[小学生都会的]MPU6050DMP库移植(stm32标准库)
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
(补录)mpu6050三种常见的滤波方法对比 | 卡尔曼滤波、一阶互补滤波、DMP姿态解算
【卡尔曼滤波器】1_递归算法_Recursive Processing
高精度蓝牙陀螺仪 十轴姿态传感器IM948模块 动作捕捉 惯导振动倾角检测
只用陀螺仪做姿态解算
STM32读取MPU9250姿态数据
MPU6050 获取姿态角度信息
树莓派-三轴陀螺仪-MPU6050基本驱动
第12讲:MPU6050姿态解算代码解读
如何处理电子陀螺仪MPU6050的零点漂移问题
STC8第十二课:MPU6050陀螺仪模块数据应用
[ROS] 六轴陀螺仪姿态读取,Rviz上位机显示imu数据,urdf小车模型
MPU6050卡尔曼和一二阶低通滤波比较
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
【RoboMaster】N8.IMU任务、姿态解算算法、陀螺仪
STM32读取MPU6050姿态数据设计
(开源)自制九轴姿态传感器模组
学习心得|基于卡尔曼滤波的MPU6050姿态解算
MPU6050+DMP获取姿态解析
CH32读取MPU6050姿态数据(卡尔曼滤波法)
【mpu6050六轴传感器】采用卡尔曼一阶滤波与互补滤波,告别数据“乱跳”
mpu6050互补滤波
【51模块库】MPU6050六轴陀螺仪 驱动代码+使用范例
卡尔曼滤波算法原理及代码实现!