V
主页
惯性/卫星松组合导航程序解读
发布人
代码百度网盘下载链接:https://pan.baidu.com/s/1LODpgsLeSLXR8DyehTrxoA 提取码:5aaf
打开封面
下载高清视频
观看高清视频
视频下载器
三维的组合导航ins和卫星的算法卡尔曼滤波和eskf滤波matlab
组合导航入门2023,014简化版惯性卫星组合导航
组合导航入门2023,002惯性导航基础
武大KF- GINS组合导航算法解析-概念部分
捷联惯性导航方程与算法(一)-惯性系导航方程与解算
惯性导航-(一至七章)
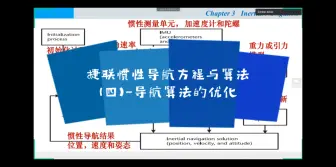
捷联惯性导航方程与算法(四)-导航算法的优化
带你了解惯性导航系统的工作原理
惯性测量单元,误差特性与模型
卡尔曼滤波与组合导航原理【西北工业大学 严恭敏】
捷联惯性导航方程与算法(三)-当地地理系导航方程与解算
惯性导航系统如何工作?——平台式与捷联式惯性导航技术
IMU进行惯性导航
徒手写卡尔曼滤波与组合导航(上)
基于智能手机的惯性/视觉组合导航
惯性/卫星松组合导航程序设计中需要注意的几点问题
惯性导航系统(空军工程大学)
“接地气”的组合导航状态变换卡尔曼滤波-第3讲 惯性/里程计组合导航
"接地气"的组合导航状态变换卡尔曼滤波-第4讲 惯性/水下多普勒组合导航
PSINS导航工具箱入门与详解【西北工业大学 严恭敏】
IMU选型、标定误差分析、AHRS组合导航
惯性-里程计之间的滚动偏差角不影响里程计速度测量值的原理演示
导航中常用的坐标系
组合导航入门2023,001绪论
武汉大学惯性导航课程合集【2021年秋】
武汉大学研究生组合导航课程合集【2022年春】
"接地气"的组合导航状态变换卡尔曼滤波-第5讲 传递对准
陀螺仪和加速度计随机游走过程单位的由来
惯性导航-8-捷联惯导系统
惯导系统初始化与对准
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
捷联惯导测试(室内 无GNSS 纯惯导)
PSINS GNSS/INS松组合186讲解
导航中坐标系变换的数学表示(一)-方向余弦矩阵
从头到尾掌握组合导航
"接地气"的组合导航状态变换卡尔曼滤波-第6讲 惯性/视觉组合导航
陀螺仪如何工作?
“接地气”的组合导航状态变换卡尔曼滤波-第2讲 惯性/卫星组合导航
卡尔曼滤波+组合导航
卡尔曼滤波与组合导航之matlab仿真