V
主页
京东 11.11 红包
哥们中了一篇ECCV2024——系统性地向自动驾驶体系引入几何表征,多快好省!
发布人
因为驾驶体系里面主要是:车辆的平移旋转,等宽的车道间距,平行的车道线,这些元素都极具几何特性,这个工作首次提出了几何表征(G-Representation),能够将高效的几何关系引入到一系列通用自动驾驶任务中来,效果好,推理快,欢迎大家多多交流! 论文链接:https://arxiv.org/abs/2312.03341 项目主页:https://invictus717.github.io/GeMap/ 开源代码:https://github.com/cnzzx/GeMap
打开封面
下载高清视频
观看高清视频
视频下载器
哥们中了一篇CVPR2024,做了一个完整版视频记录
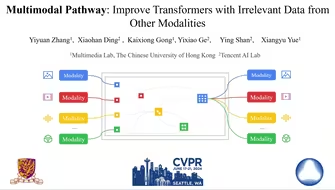
哥们还中了一篇CVPR2024——多模态时代让卷积网络再次伟大!
李沐-YOLOv3史上写的最烂的论文-但很work
南开大学、南洋理工大学2024年AI顶会作弊被查
【猫meme】如何在2024年把线性代数做到CCF-A/SCI一区,本科生超快速入门深度学习方向,1个epoch训练完持续学习任务
NVIDIA 自动驾驶实验室|端到端自动驾驶:鸟瞰图(BEV)
奇葩问题把李沐大神整不会了
实习Vlog | 高薪公司?养猪厂?00后来苏州Momenta入职第一天,感觉咋样?
41个方向的探索:ECCV2024论文深度解读
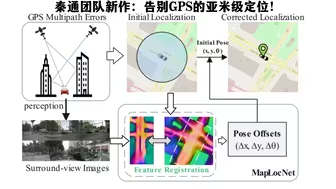
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
【李沐】因为过拟合刷题,我最后只能去MIT和CMU这种学校
徒手造高达! 一篇CVPR2024,巨帅的交互式3D生成!!
套瓷
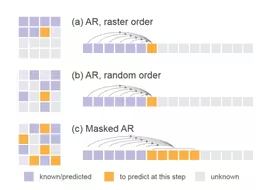
何凯明:Autoregressive Image Generation without Vector Quantizarion.
CVPR2024中的多特征融合,附即插即用代码
【AIGC-3D生成】英伟达将3D高斯用于图生3D内容
【AIGC】双向扩散模型:高质量的3D生成通过引入2D和3D先验信息
哥们在CVPR2024中的最后一篇论文,七月更新ECCV~
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
【自动驾驶】利用几何性质来构建高精地图
视频下线人工智能专家陶大程武大ACL论文并没有抄袭ICLR24
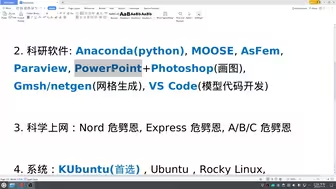
MMLab入组必学的软件
征服审稿人的画图技巧,大幅提升你的生产力,看了高兴一整天
研一师弟们终于早出晚归发奋图强科研了!
之前学过pyqt觉得pyqt是个lowb,现在嘛每单多拿几百块钱是真香
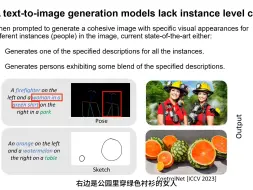
【AIGC-图像生成】精细控制网络: 通过空间对齐实现图像生成中的细粒度文本控制
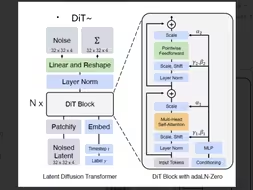
【研1基本功 (真的很简单)Diffusion Vision Transformer (DiT)】构建DiT核心代码
CVPR 2024盛况空前!上海科技大学夺得最佳学生论文奖,惊艳全场!
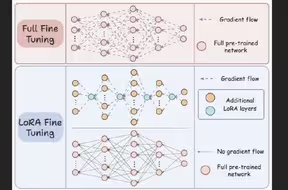
【研1基本功 (真的很简单)LoRA 低秩微调】大模型微调基本方法1 —— bonus "Focal loss"
论文抄github算不算抄袭?
[Meta-Transformer: A Unified Framework for Multimodel Learning]官方解读
如何最快水一篇论文?方法教给大家了,快去拼手速吧!
欢迎加入中科大计算机学院AIoT实验室!
AI让用户随心所欲地操作视频生成过程!
3D Gaussian Splatting代码解读第二期part1(forward.cu)
老师已破防[第28期]如何在overleaf写最少的字,让人破最多的防?至此已成艺术
浅谈计算机、人工智能方向科技论文撰写技巧