V
主页
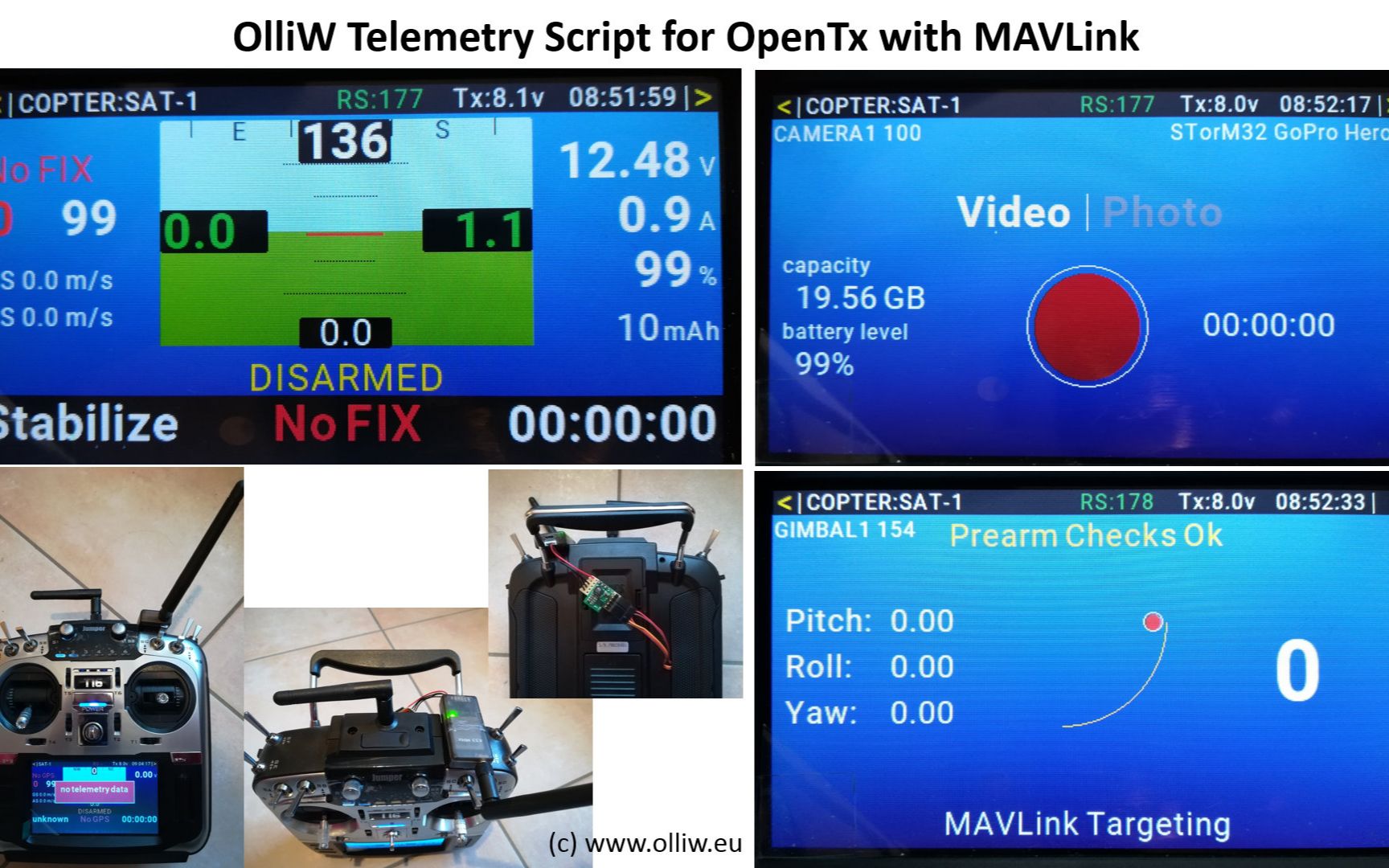
【德国大神OlliW42】OpenTx遥控与MAVLink回传脚本:固件与脚本安装
发布人
https://www.youtube.com/watch?v=UnM0D6xpcas 中文讨论区:http://shequ.dimianzhan.com/articles/698
打开封面
下载高清视频
观看高清视频
视频下载器
Pixhawk4+Tarot650机架测试飞行与航拍基本操作
【德国大神OlliW42】OpenTx遥控与MAVLink回传脚本:硬件部分
全新Holybro Durandal H7飞控刷写ArduPilot 4.0固件飞行测试 by 翔大模型
Jumper T16遥控结合Pixhawk4开源飞控Yaapu回传脚本完全飞行演示
用Jumper T16遥控连接Pixhawk4飞控显示数传回传信息和地图(yaapu FrSky lua回传脚本)
【DIY开源无人机】国外大神的 Holybro Pixhawk 4 开箱
【ArduPilot开源飞控】OpenTX Lua数传与FrSky回传库| @yaapu Alex Apostoli | 2020年ArduPilot开发者大会
用MP和最新的ArduPilot固件为Pixhawk等兼容飞控升级ChibiOS Bootloader 由ArduCopter作者Randy演示
Pixhawk4运行ArduPilot固件自动调参Autotune增强飞行性能和体验
【Painless360】航模遥控入门 - PWM,PPM,CPPM,S-BUS,Sat. 协议的区别和选择
【ArduPilot开源飞控】直升机更新 | 由直升机维护者Bill Geyer讲解 | 2020年ArduPilot线上开发者大会
300元的数传能飞126公里不失控 百元级数传碾压千元行业级数传 ELRS 3.5.0固件数传MAVLINk使用教程
PX4软件在环(SITL)仿真现已支持FlightGear
【RC遥控器】RadioMaster TX16S与Jumper T16对比评测
Jumper T18全新五合一(5IN1)开源OpenTX系统遥控器发布 不再是四合一(4IN1)
【斯东原创】云卓Skydroid H16手持地面站图传遥控一体机升级教学 | 第一部分 | 地面端和天空端固件升级
【ArduPilot开源飞控】控制器更新 | 核心控制算法开发者Leonard Hall讲解 | 2020年ArduPilot线上开发者大会
Holybro Pixhawk4 S500 Kit 四旋翼无人机套机装机演示-01安装电机
【开源飞控】QGroundControl(QGC地面站)入门教学
【DIY开源无人机】Holybro S500 V2 | 官方推荐Pixhawk4套机 | Dronecode飞行测试团队试飞演示
PX4 SITL与Microsoft Airsim终于解决兼容性问题 | 仿真飞行演示
【无人机】Dshot MultiShot OneShot PWM是什么以及优缺点 | 电调通讯协议解读 - PART 1 | Joshua Bardwell
【ArduPilot开源飞控】PI Connect 树莓派HAT | 由Stephen Dade讲解 | 2020年ArduPilot线上开发者大会
【无人机】使用MAVSDK通过MAVLink控制无人机 | 由MAVSDK维护者Jonas Vautherin讲解 | PX4开发者峰会@ETH苏黎世联邦理工
【开源飞控】ArduPilot+T265室内无GPS测试
【PX4开源无人机】软件在环仿真(SITL)的配置和开发流程 | Jaeyoung Lim | PX4线上开发者峰会2020
ArduPilot使用OpenMV与AprilTag进行精准降落
【无人机】MAVLink3进度更新 | 暂时不会有MAVLink3了 | 由Lorenz Meier讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【无人机】UAVCAN:用于硬实时航空器网络的高可靠发布订阅协议 | 由Pavel Kirienko和Scott Dixon讲解 | PX4开发者峰会2019
【零基础无人机组装教学】Pixhawk4飞控+Tarot机架从组装到试飞视频
【思动学院】VMware虚拟机Ubuntu/Linux系统满帧率运行Gazebo仿真 | PX4入门之开发环境搭建视频教学
Holybro Pixhawk4 Mini 极限剪桨震动测试
【机器人】开源机器人:上手 Gazebo 与 ROS 2
【PX4开源飞控无人机】入门教学:在Linux(Ubuntu)上安装搭建PX4开发环境 | Brian Philips
[视频教学] 快速实现 PX4 Offboard 模式飞行以及 Gazebo 仿真 | 无人机自动驾驶GAAS 01
【PX4开源飞控无人机】MAVROS Python使用教程(一):安装与基本设置 | Farhang Naderi
【无人机】ROS2为PX4增添新动力 | 由Nuno Marques讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【PX4开源无人机】高中生团队分享自主无人机竞赛经验 | AmadorUAVs | PX4线上开发者峰会2020
【教学】Kakute F7 AIO完整接线指南运行ArduCopter | TFMini激光定高 思码光光流 Matek M8Q-5883 FrSky R9MM
【开源飞控无人机】控制分配:重构PX4混控系统 | Julien Lecoeur & Silvan Fuhrer | PX4线上开发者峰会2020·直播录像