V
主页
ITNG 2019 - An Architecture to Connect the Dynamixel AX-12A to the
发布人
https://www.youtube.com/watch?v=N2OU7cOYCEs
打开封面
下载高清视频
观看高清视频
视频下载器
Dynamixel舵机介绍
How to connect the TB6612FNG Dual H-Bridge motor dirver to an Arduino and Raspbe
Dynamixel教程10:控制AX-12电动机上的扭矩
Dynamixel教程9:AX-12电机上的关闭/打开扭矩和LED
Dynamixel Tutorial _ How to control the Dynamixel Ax12 Motor using
Dynamixel 位置反馈的Demo
没有线的风筝,照样飞!!!
做的很棒的几款飞行机器人
PyRoboLearn_ Kinematics
ros+openai(5)基础1
7款 变形机器人
DARPA 机器人地下挑战赛
力矩陀螺 自平衡装置
乐高多轮障碍攀爬车
DYNAMIXEL AX系列 自己动手更换齿轮
Bobble-Bot 介绍
展示DYNAMIXEL X系列的伺服运动
1/12 雅马哈 YZF-R1M
Connecting ROS to Arduino __ 5 Minutes
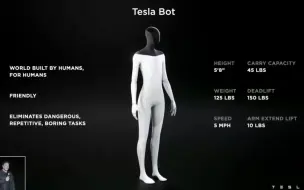
Tesla Bots 特斯拉提出的人形AI机器人
COG_ Connecting New Skills to Past Experience with Offline RL
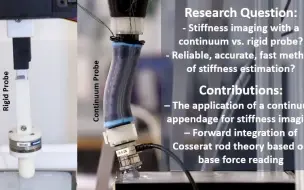
连续介质刚度成像
这个机器人叫啥来着???来看看是如何制作的
Flexure joints for large range of motion by Precision Engineering
两轮汽车的工作原理
进化
DYNAMIXEL 齿轮校准 (MX 64 _ MX-106)
右上角的机器人,你可能见过
Controlling Dynamixel with ROS_jdIo5hyAST0_1080p
反作用轮与力矩陀螺的区别。。
ROS2 QA 214 How to Install TurtleBot3 packages on ROS2
行走机构
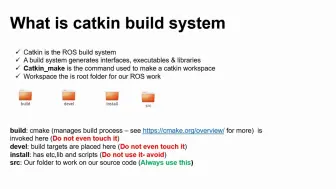
第3.1集-软件准备-概述
轮腿机器人
用ROS搭建一台自平衡机器人
如何用强化学习来训练机器人
第3.3集-软件准备-Linux
ROS Robotics Tutorials _ Robot Operating System
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
目前最帅的10款 机器狗