V
主页
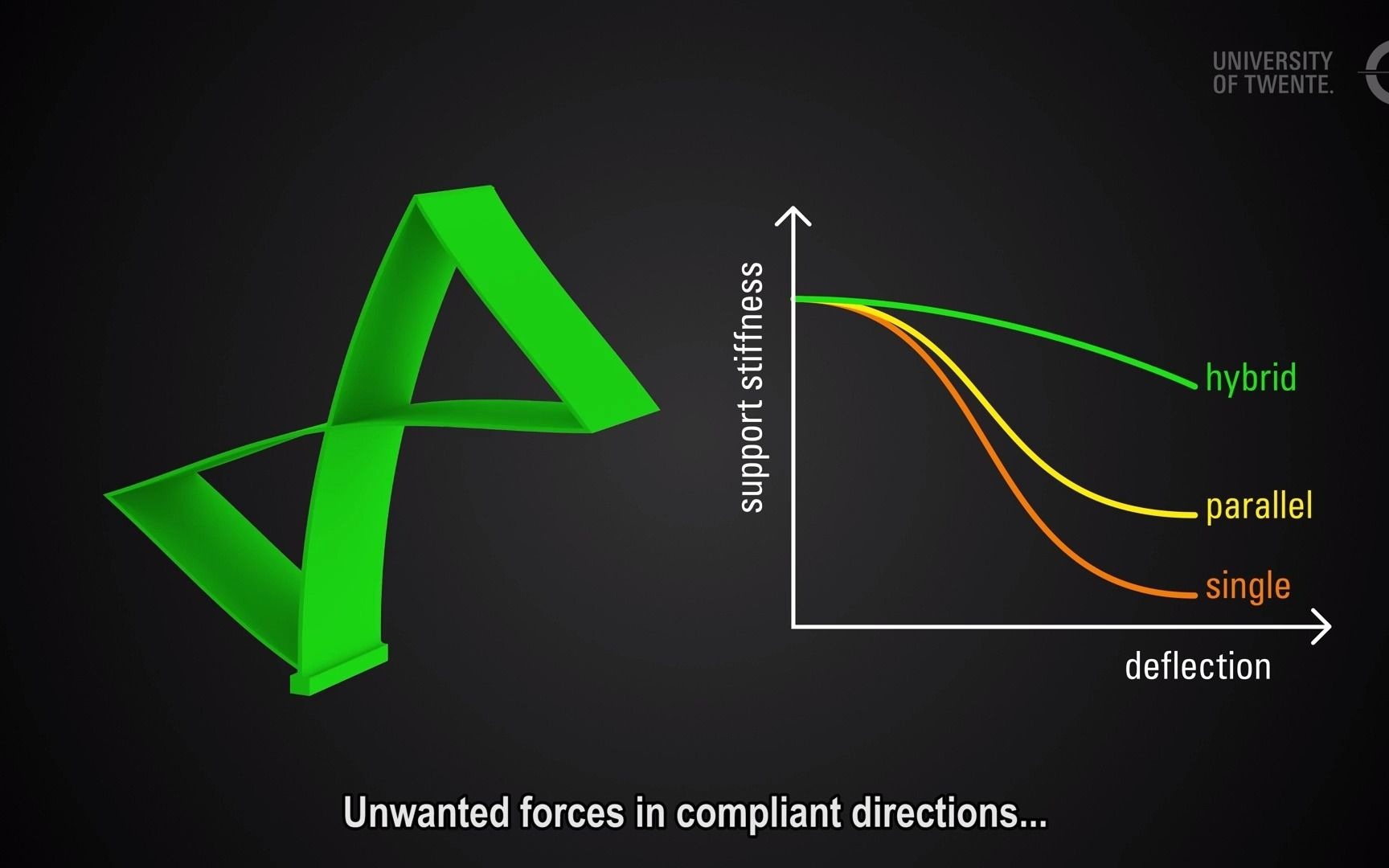
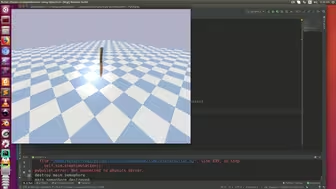
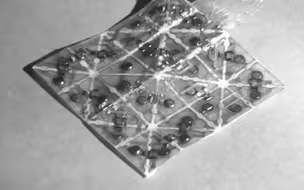
Flexure joints for large range of motion by Precision Engineering
发布人
https://www.youtube.com/watch?v=4fFH2RHpcTY
打开封面
下载高清视频
观看高清视频
视频下载器
7款 变形机器人
轮式机器人越障力学分析
PyRoboLearn_ Kinematics
PyRoboLearn_ Dynamics
可以自己爬起来的 ESP32自平衡 机器人
有趣的机构欣赏
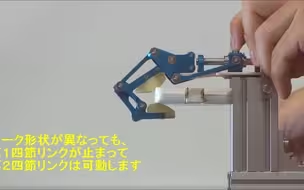
D-Hand 複合四節リンク機構 | ダブル技研株式会社
ITNG 2019 - An Architecture to Connect the Dynamixel AX-12A to the
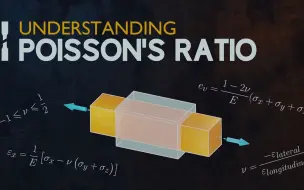
【中文字幕】理解 泊松比
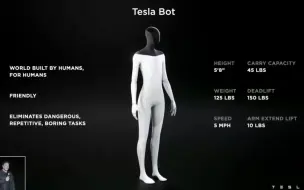
Tesla Bots 特斯拉提出的人形AI机器人
NASA 张拉机构 概念动画 Tensegrity Rover
10款优异的军用机器人
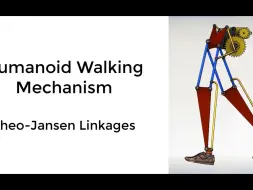
行走机构
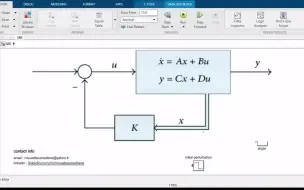
applying an LQR command on a self-balancing robot in Simulink
MIT的变形机器人
造一个蜘蛛机器人
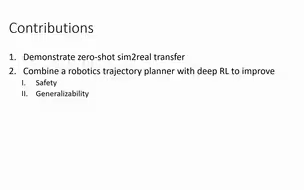
LBGP_ Learning Based Goal Planning for Autonomous Following
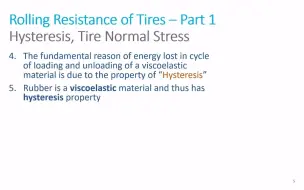
搞懂滚动摩擦
Bobble-Bot 介绍
Walking Position Commanded NAO Robot
ROS2 QA 214 How to Install TurtleBot3 packages on ROS2
如何快速低成本开展机器人项目
反作用轮与力矩陀螺的区别。。
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
做机器人有必要了解下这种机构
这个机器人叫啥来着???来看看是如何制作的
少儿搏击现场 比预期燃10倍
DIY Two Speed Gearbox for Go Kart Very eassy
10款新颖的交通工具
基于线性化ZMP约束的轮腿四足机器人轨迹优化
终结者来袭,这不是科幻!
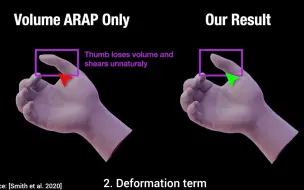
VR 手
美国 DARPA 2020 机器人相关研究
ROS+OPENAI(4-4)多机器人简单示例
[开源]Moveit ROS Control Robot demo and Code details
ROS多线程 与 Linux进程(2)
攀爬机器人
组装一台3D打印机
1/12 雅马哈 YZF-R1M
快速构建机器人原型