V
主页
京东 11.11 红包
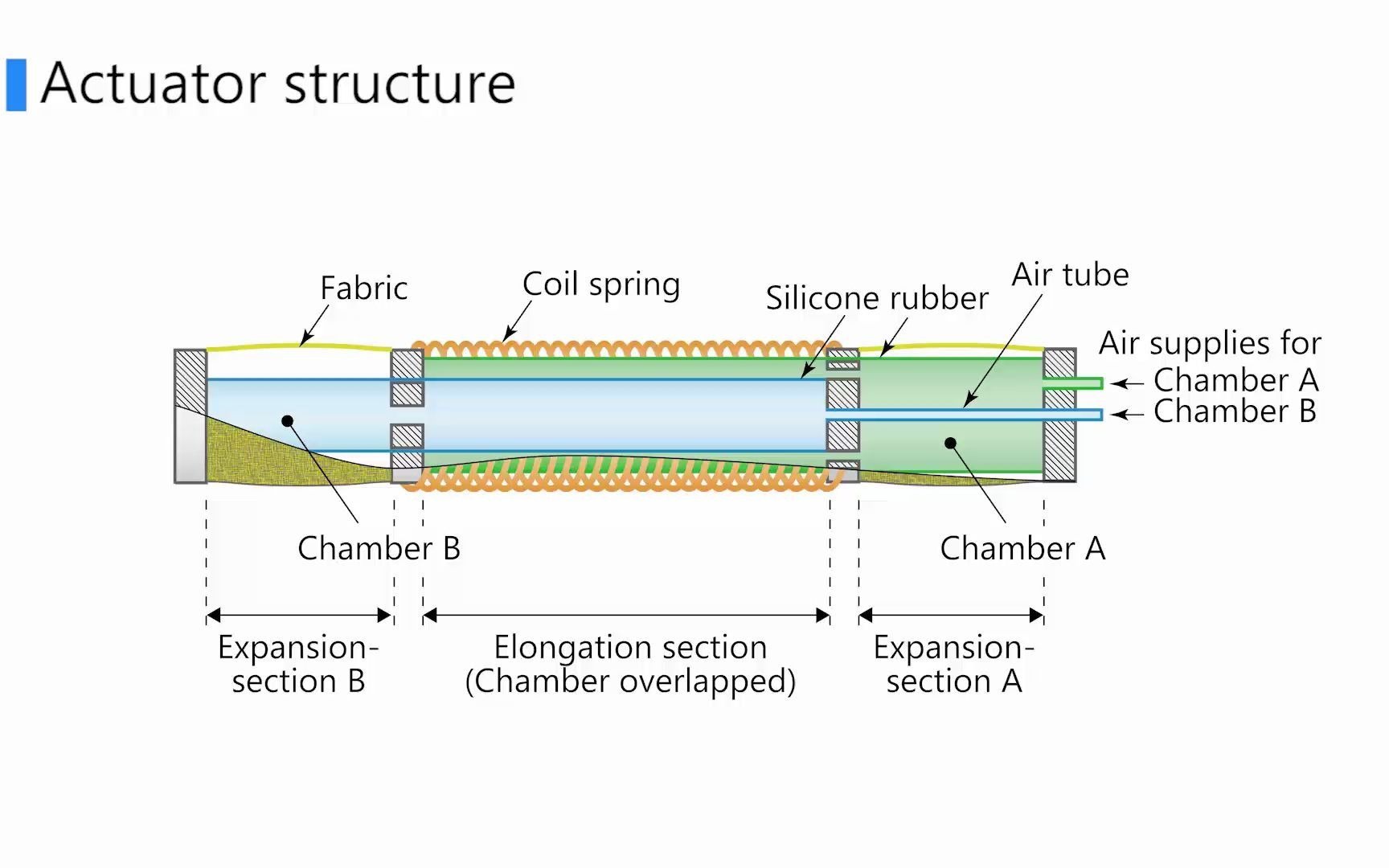
Pneumatic Duplex-Chambered Inchworm Mechanism for Narrow Pipes
发布人
https://ieeexplore.ieee.org/abstract/document/9121680/media https://ieeexplore.ieee.org/abstract/document/9121680/media Pneumatic Duplex-Chambered Inchworm Mechanism for Narrow Pipes Driven by Only Two Air Supply Lines
打开封面
下载高清视频
观看高清视频
视频下载器
evoBOT als Ladeassistenz
The GITAI IN1, an inchworm-type robotic arm
Bipedal Robot Climbing Ladder like a Human - Robovie-Z
Wearable assistive robotics with integrated sensing
Robotics Pathways & Careers- Kimberly Hambuchen, NASA
Towards Collective Artificial Intelligence- Radhika Nagpal, Princeton University
Telerobots for the Pharmaceutical Industry
CMU Faculty Dialogues- Softbotics
Humanoid robot David shows in-hand manipulation skills
Ascento: Automated Outdoor Security Patrolling
LittleDog Clips and Outtakes
Softbank How Large Companies Approach Robotics
ExynAI, Modular Autonomy for Mission Critical Data
ICRA 2022 - Kicking off
A Fractal Suction-based Robotic Gripper for Versatile Grasping
Learning Quadrupedal Locomotion over Challenging Terrain
Ameca Facial Expressions
Intelligent Wearable Robotic Devices for Augmenting Human Locomotion
解剖学的なウマ型歩行ロボット Horse-inspired walking robot based on anatomy
Statistics
Festo Bionic Learning Network_ Innovations inspired by nature
Allison Okamura - Human Interface for Teleoperated Object Manipulation with a So
The design and fabrication of a soft robotic hand
ICRA2024- Supernumerary Robotic Limbs to Support Post-Fall Recoveries for Astron
MIT Robotics - Russ Tedrake - Planning with Graphs of Convex Sets (in the age of
Tapomayukh Bhattacharjee - Robot assisted feeding- exploring autonomy with perce
Figure Status Update - OpenAI Speech-to-Speech Reasoning
Optimal elastic wing for flapping-wing robots through passive morphing
On-Orbit Servicing, Assembly, and Manufacturing 2 (OSAM-2) Animation
Allison Mariko Okamura-Wearable Haptic Devices for Ubiquitous Communication
The One-Wheel Cubli
One giant leap for the mini cheetah
The Wheelbot_ A jumping reaction wheel unicycle robot
Building Multidisciplinary Teams for Surgical Translation of AI
Robot Discussion between Marc Raibert & Daniela Rus - Daniela Rus & Marc Raibert
Wearable Muscles
Towards Closing the Perception-Planning and Sim2Real Gaps in Robotics
Understanding the Utility of Haptic Feedback in Telerobotic Devices
Novel Tensegrity Robot Driven by Thin Artificial Muscles
A Multi-body Tracking Framework - From Rigid Objects to Kinematic Structures