V
主页
京东 11.11 红包
Building Multidisciplinary Teams for Surgical Translation of AI
发布人
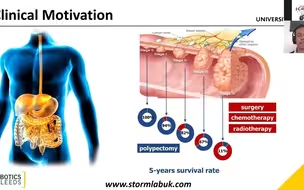
GRASP Lab GRASP On Robotics_ Daniel Hashimoto, University of Pennsylvania ABSTRACT Surgical Data Science aims to improve the quality of interventional healthcare and its value through capture, organization, analysis and modelling of data. The operating room has long been siloed from in-depth review and analysis, but recent advances in computer vision and surgical robotics offer the promise of improved understanding of intraoperative events. However, challenges remain around collecting and annotating intraoperative data and modeling complex physiological phenomena and workflow during surgery. We will explore a few of these issues and discuss the role of multidisciplinary teams in promoting the democratization of surgical knowledge through surgical data science. Daniel Hashimoto is assistant professor of surgery at the Hospital of the University of Pennsylvania. He obtained his B.A. in Biology with a specialization in Neuroscience from Boston University. He earned his MD from the University of Pennsylvania and obtained an M.S. in Translational Research with a focus on technology and surgical education for which the majority of his research was conducted at the Imperial College London. His postdoctoral research fellowship at MGH focused on surgical applications of computer vision for which he was supervised by Professor Daniela Rus of MIT CSAIL. He completed his general surgery residency at Massachusetts General Hospital (MGH) and a clinical fellowship in foregut surgery and comprehensive flexible endoscopy at Case Western Reserve’s University Hospitals Cleveland Medical Center.
打开封面
下载高清视频
观看高清视频
视频下载器
Softbank How Large Companies Approach Robotics
ICRA2020 Workshop on Sensing, Estimating and Understanding
Cable Traversing Bimanual Robotic Manipulators for Expandable Range Application
Challenges and Opportunities of Soft Robotics Workshop: Research, Applications
Pneumatic Duplex-Chambered Inchworm Mechanism for Narrow Pipes
全球100位伟大女性之一李飞飞演讲:我为什么投身AI事业?
Workshop - Closing the Perception-Action Loop with Vision and Tactile Sensing
Wearable Muscles
Soft Robots for Humanity- - Allison Okamura
[Vstone] Teleworking with Robot [Robovie-Z]
GRASP Lab Days 2022 - Collaborative Human-Aware Robotics
Learning Quadrupedal Locomotion over Challenging Terrain
超全超简单!一口气刷完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM、DBN等八大深度学习神经网络算法!真的比刷剧还爽!
122集付费!CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络一口气全部学完!
AIM 2020 Workshop on Supernumerary Robotic Devices
Statistics
Contact-rich robotics: learning, impact-invariant control, and tactile
Fronteras en Computación Matemática- Paolo Robuffo Giordano (IRISA)
Telerobots for the Pharmaceutical Industry
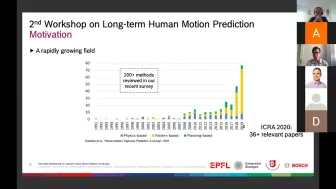
ICRA 2020 2nd Workshop on Long-term Human Motion Prediction (LHMP)
CS287 Advanced Robotics at UC Berkeley Fall 2019 -- Instructor: Pieter Abbeel
ICRA2021 Plenary Talk -- Medical Capsule Robots - A Fantastic Voyage
Intelligent Wearable Robotic Devices for Augmenting Human Locomotion
Ameca and Azi having a chat
虚拟操控 Virtually turning robotic manipulators into worn devices
Billiard-Like Robots Let Them Be Unstable and Unobservable
LittleDog Clips and Outtakes
解剖学的なウマ型歩行ロボット Horse-inspired walking robot based on anatomy
Push Recovery for Nadia
Versatile Articulated Aerial Robot DRAGON- Aerial Manipulation and Grasping
ICRA 2022 - Machine lingo
深度学习种地 Robotics and Deep Learning in Production Agriculture
Matthew T. Mason _ Robotics and Warehouse Automation at Berkshire Grey
Daniele Pucci - Wearable Technologies, Estimation & Control for Human Robot Coll
evoBOT als Ladeassistenz
杂乱环境下视觉语言多模态的协同推抓demo展示
B站强推!这绝对是目前最完整系统的【MATLAB教程】花3小时就能从入门到精通,草履虫都能学会的机器学习算法!人工智能|神经网络|机器学习
Allison Mariko Okamura-Wearable Haptic Devices for Ubiquitous Communication
Feasibility Study of LIMMS (UR2022)
A Rapidly Reconfigurable Collaborative Robotic Cell for Performing Satellite Ass