V
主页
树莓派打了实时补丁xneomai的效果为什么变差了
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
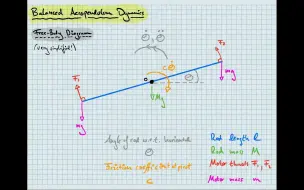
arduino官方自平衡自行车资料解读(5)理论-仿真-实践
ROS+OpenAI(15)ROS-control
用ubuntumate回忆街机游戏
64位的树莓派咋样?
How to connect the TB6612FNG Dual H-Bridge motor dirver to an Arduino and Raspbe
机械专业的同学 值得一看 很不错的动画
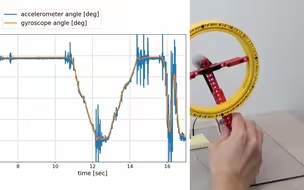
Raspberry Pi show real time sensor data in a graph Python
树莓派实时时钟安装配置
如何处理树莓派 实时进程
这个新款的树莓派有哪些不一样???
arduino官方自平衡自行车资料解读(3)与其他硬件通讯
arduino官方自平衡自行车资料解读(4)装配动画之机构组成(录屏)
树莓派 3b ubuntumate 安装 ros
树莓派+VNC+ubuntumate16.04
ROS+OpenAI(9)基础5-树莓派与虚拟机的ROS通信
做的很棒的几款飞行机器人
手把手搭建一个自平衡反作用轮摆
乐高多轮障碍攀爬车
ros+openai(6)基础2
铝手
Installation of TensorFlow on Raspberry Pi
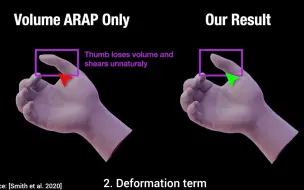
VR 手
Dynamixel MX 系列
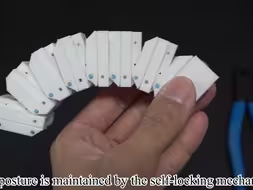
单自由度平移/旋转切换机构的高载荷自适应机械手
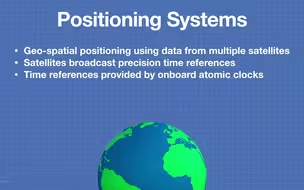
基于Arduino和树莓派的GPS模块
DIY一个12V的水泵
ROS+OpenAI(4-1)从零开始创建智能小车-建模
控制系统设计之动力系统建模2/6
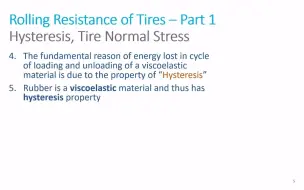
搞懂滚动摩擦
How to install tensorflowlastest version on Raspberry Pi
力矩陀螺 自平衡装置
Bobble-Bot 介绍
非常强大的驱动器 RMDX10
Getting Started with TensorFlow for Raspberry Pi
破解肢体语言的秘密,用于机器人技术
理解“失效”
强化学习 四足
ITNG 2019 - An Architecture to Connect the Dynamixel AX-12A to the
ros+openai(5)基础1
球形机器人 SLAM