V
主页
京东 11.11 红包
ROS+OpenAI(15)ROS-control
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ros+openai(1)简介
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
ros+openai(5)基础1
ros+openai(6)基础2
ROS+OpenAI(11)基础7-tf2坐标变换与四元数
arduino官方自平衡自行车资料解读(5)理论-仿真-实践
Dynamixel Tutorial _ How to control the Dynamixel Ax12 Motor using
ROS+OpenAI(4-1)从零开始创建智能小车-建模
ROS+OpenAI(7)基础3-“服务”
做机器人有必要了解下这种机构
ROS+OpenAI(10)基础6-ROS时间
ros+openai(3-2)tensorflow1
乐高-球形机器人
[IROS2019] Jumping robot with balance control mechanism
Arduino 切纸机 打造教程
ROS+OpenAI(13)urdf进阶-xacro
行走机构
机械臂 强化学习 平衡一个球
LQR倒立摆 从建模到控制 零基础都能复现
[开源]Moveit ROS Control Robot demo and Code details
ROS+OpenAI(12)基础8-数据记录与导出
解读设计优异的机械臂
ROS多线程 与 Linux进程(1)
Insectlike robots 仿生昆虫机器人
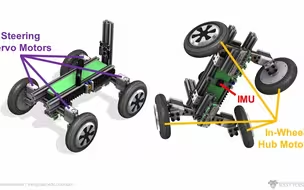
轮式机器人越障力学分析
10款优异的军用机器人
Experimental Wave Drive
DIY一个12V的水泵
ROS+OpenAI(14)gazebo物理参数
IROS 2020 机器人姿态控制
最新分体式火星车
Snow Simulation
ROS+OpenAI(9)基础5-树莓派与虚拟机的ROS通信
树莓派打了实时补丁xneomai的效果为什么变差了
虚拟球铰 组合成的 机械臂
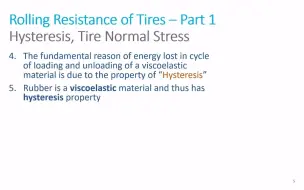
搞懂滚动摩擦
15款超大型战争机器
没有线的风筝,照样飞!!!
强化学习在lego上的部署
DIY String Shooter