V
主页
杜克大学 SonicSense 基于手持式声学传感的物体感知
发布人
视频出处:https://www.youtube.com/watch?v=MvSYdLMsvx4&list=WL&index=2 项目主页:http://www.generalroboticslab.com/blogs/blog/2024-06-26-sonicsense/index.html 摘要:我们引入了SonicSense,这是一种硬件和软件的一体化设计,通过手持式声学振动感测来实现丰富的机器人物体感知。虽然之前的研究已经展示了声学感测在物体感知方面很有前景的结果,但当前的解决方案仅限于少数具有简单几何形状和均匀材料的物体、单指感测,以及在同一物体上混合训练和测试。SonicSense能够实现容器库存状态区分、异质材料预测、3D形状重建以及从83个多样化真实物体中重新识别对象。我们的系统采用简单但有效的启发式探索策略与物体互动,并使用端到端的学习基础算法融合振动信号以推断物体属性。我们的框架强调了手持式声学振动感测在推进机器人触觉感知中的重要性。
打开封面
下载高清视频
观看高清视频
视频下载器
Aidin Robotics推出15个主动自由度,配置指尖六维力传感器的机器人五指灵巧手
卡耐基梅隆 Neural Feels with Neural Fields: 视觉-触觉感知在手持操纵中的应用
卡耐基梅隆大学 MidasTouch——一个用于在线全局定位的视触觉感知系统
Taichi模拟四个涡的碰撞
灵巧手遥操作
太极图形--流固耦合简单示例
Cristina Cipriani: 一种用于训练神经ODE和自编码ODE的平均场最优控制方法
ClimaX -用于天气预测的基础模型
将偏微分算子以多分辨率方式集成到神经网络架构中,用于时空预测 || Seminar on May 3, 2024
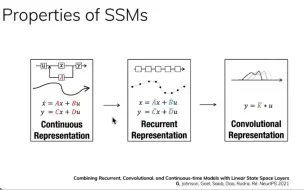
Efficiently Modeling Long Sequences with Structured State Space 结构化状态空间模型用于长时序建模
EPFL 图形实验室——关于可微分渲染,我能告诉你的一切
小小挑战,FTP灵巧手轻松“拿捏”!
KAN真的能取代MLP吗
肖仰华:认知智能到底怎么实现?
国内的机器人已经可以小跑了,特斯拉的机器人为什么还在玻璃柜里陈列着?
康奈尔大学 The Mamba in the Llama:蒸馏加速混合模型
具身智能基础简述
2024年你不能错过的五个3D Gaussian Splatting应用
MC(monte Carlo)渲染的去噪算法进展
堪比人手的五指灵巧手,12个触觉传感器模块,抓持力与人手相当
傅利叶GR-2,不止是颜值。
#4 - Hungry Hungry Hippos Towards Language Modeling with State Space Models
四足机器人从视觉学习地形物理参数|2024【苏黎世联邦理工学院】
慕尼黑工业大学提出SupeRVol: 逆向体积渲染中的超分辨率形状和反射率估计
具身智能-通用抓取综述(model base 3D视觉派)
#1 - Mega Moving Average Equipped Gated Attention
【卡耐基梅隆大学SIGGRAPH2024】Laplacian is All You Need :计算符号距离的扩散方法
谱图理论简要入门
Dr.Jit 可微分渲染的即时编译器【抛弃神经网络】
肖仰华:机器如何表达和获取人类知识?
从物理学走向AI,从李飞飞到AI「教母」
Enzyme:基于LLVM编译器的反向模式自动微分
【卡耐基梅隆 SIGGRAPH2024】调和函数的球面追踪算法
【SIGGRAPH Asia】GroomGen 发型生成神器,从图像中重建发型支持交互式编辑
为什么人在梦里跑不快,人脑和动物脑互换实验?大模型都活在梦里
流匹配:简化和泛化扩散模型
【熟肉】Extropic团队热力学计算比量子计算更优?
【S3】中文字幕|人形机器人:通向永生之路 - Chasing Immortality with Humanoid Robotics|Eric Jang
MuxHand-多电机复用的绳驱三指灵巧手
PhotoMaker 一键生成你的个性化艺术照#腾讯出品