V
主页
京东 11.11 红包
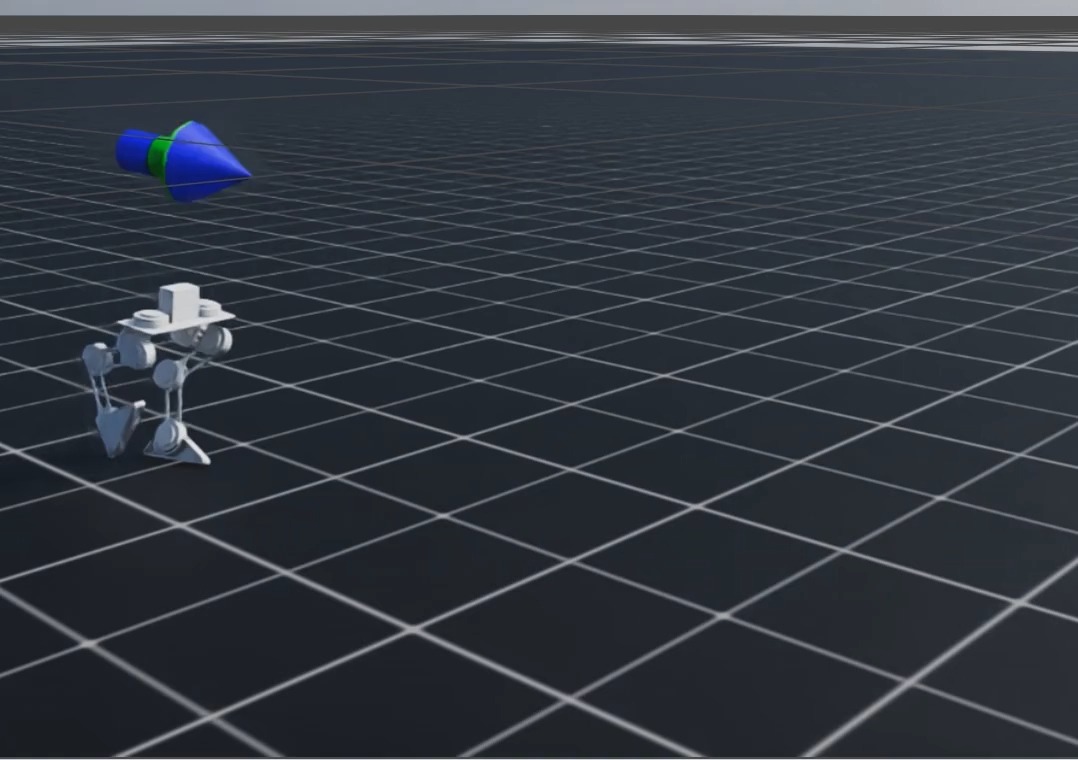
双足机器人RL,步态诡异
发布人
强化学习果然很强大,在Isaac Lab中进行双足机器人RL训练,sim2sim迁移至mujoco,只是动作很奇怪,双脚动作总是不对称,不知道奖励函数哪里设置不对。
打开封面
下载高清视频
观看高清视频
视频下载器
最新视频 波士顿动力 Atlas 万圣节
双足机器人RL,sim2sim
在isaaclab中开发viplanner端到端导航
rl_sar现已支持go2,欢迎试用
在IsaacLab中跑ViPlanner,代码正在PR
复现human2humanoid
issacgym sim2sim
终于可以站起来了,就是lstm训练的慢了好多…
使用ROS2-Control + RL来控制四足机器人
电子游戏,科技沃土!
人形机器人sim2sim行走测试
在IsaacLab中的UnitreeA1上重放AMP动捕数据
用7年前的显卡在那跑强化学习 issacgym
g1套humanoid_gym
一机多用“三合一”足端设计机器人
【Python】人形机器人——全身控制
强化学习,启动!
运控记录 | 使用ocs2框架,实现单腿六自由度人形机器人Hi的行走
音乐恐怖,吓倒Spot狗狗了 波士顿动力 万圣节
1050ti的显卡勉强能跑跑,sim2sim
最新 Boston Dynamics Atlas 人形机器人 合集
逐际动力 | 多形态双足机器人 TRON1 | 6.98万 | 人工智能机器人
帮助截瘫患者 | 站立行走的 | 外骨骼机器人 WalkON | 人工智能机器人
四足机器人足臂协同 ocs2 qm_control 开源项目学习
灵巧手钢琴演奏 RoboPianist
IsaacLab交流群及文档更新说明
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
issacgym 训练400次的效果 强化学习 人形
基于安全区域强化学习的狭窄空间阿克曼机器人自探索
高擎机电亮相国际机器人学术顶会IROS2024
LLM-PySC2:LLM starcraft II learning environment 基于pysc2的大语言模型星际争霸2决策仿真训练环境
Humanoid Self-Collision Avoidance Using Whole-Body Control with CBF
使用urdf在ROS2中构建四足机器人的Gazebo和Mujoco仿真
B2机器狗负重夜爬太子尖
双热点强强联合的发文方向:Transformer+强化学习!
【Python】人形机器人——模型预测控制
TITA强化学习迁移
波士顿动力 Spot 足臂协同操作
强化学习四足机器人二
Diffusion-based Path Planner for Synthesizing Trajectories Applied on Quadruped