V
主页
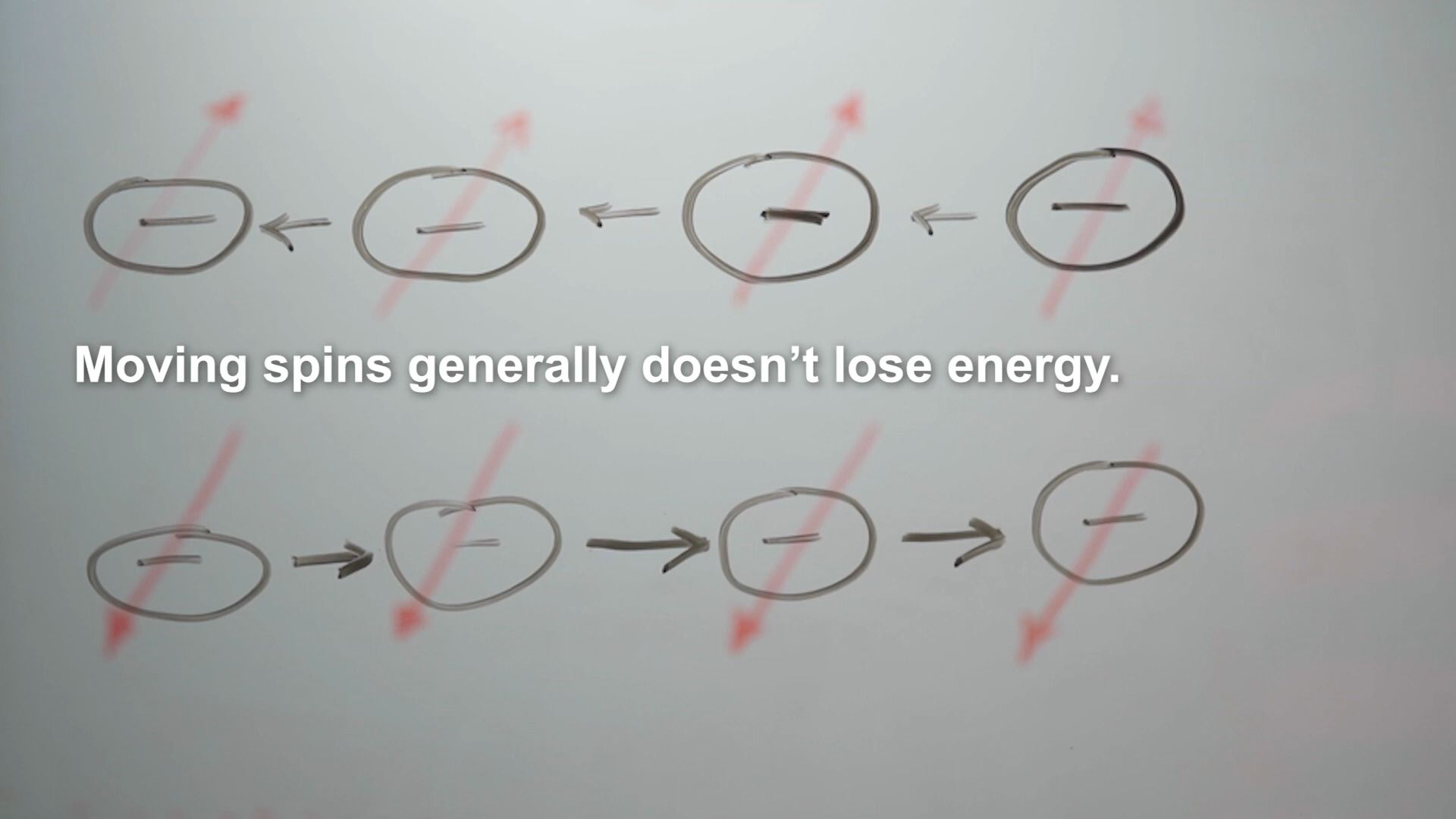
自旋电子器件用于能效计算
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
阿里大规模计算集群网络稳定性的挑战与实践
用于近存计算的DPU加速Peta Scale存储系统
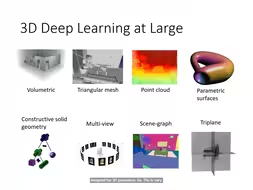
AI与3D生成
Stanford CS149 并行计算,Cache Coherence 11
Stanford CS149 并行计算,Memory Consistency 12
RLOO,新的在线RLHF训练算法
家庭通用机器人
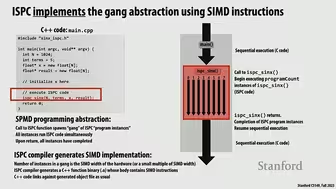
Stanford CS149 并行计算,Hardware Specialization 18
Edgecore network,支持 10万级GPU节点的网络扩展方案
基于优化的敏捷足式机器人控制与规划
Stanford CS25: Robotics and Imitation Learning
ICML2024 Tutorial,Machine Learning on Function spaces
Stanford CS149 并行计算,数据并行 8
Triton Compiler介绍
从物理系统中学习的欧几里得神经网络E(3)NN
SIGCOMM2024,CacheGen 用于快速模型服务的KV缓存压缩和流式处理
基于意图和故障的轨迹预测,用于协同定位和防碰撞
机器人空间感知基础
利用结构实现高效灵活的机器人接触操作
Computer Architecture 2024,Memory Controllers:服务质量和性能 11
下一代机器人感知:3D场景图,可验证算法,自监督学习
NFS v4.2,用于AI架构中高性能和分布式数据处理的linux新标准
LeftoverLocals漏洞利用GPU本地内存泄露,影响大模型数据安全
AI Hardware
高效ML模型中的合成技术
Geometric Regularizations for 3D Shape Generation
Mamba和S4解读:架构、并行扫描、内核融合、循环、卷积、数学
Stanford CS149 并行计算,并行计算基础 4
RISC-V Microprocessors
[CoRL2023] OOD Workshop: 如何在分布之外泛化机器人
Stanford CS149 并行计算,GPU架构和CUDA编程 7
Stanford CS149 并行计算,midterm review 14
Robotics in the Age of Generative AI
神经场在机器人操作中的应用
通用机器人路径思考:scaling law、数据飞轮和具身智能
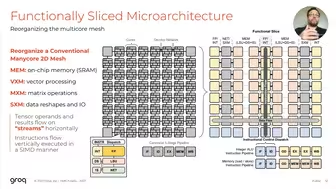
Groq张量流式处理器架构
从物理互动中学习结构化世界模型
凸集图及在最优控制和运动规划中应用
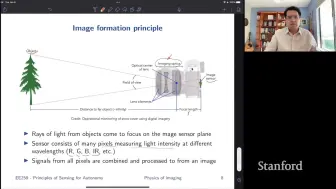
Stanford EE259:镜头、图像传感器、图像信号处理
一种结构化方法来实现机器人学习泛化