V
主页
喷气动力飞行人形机器人:故障检测和容错控制|2023【Italian Institute of Technology】
发布人
论文: Nava, Gabriele, and Daniele Pucci. "Failure Detection and Fault Tolerant Control of a Jet-Powered Flying Humanoid Robot." arXiv preprint arXiv:2305.16075 (2023). https://arxiv.org/pdf/2305.16075v1.pdf GitHub代码:https://github.com/ami-iit/paper_nava_2023_icra_fault-control-ironcub YouTube:https://www.youtube.com/watch?v=Ejrny_C-6Vc Abstract: Failure detection and fault tolerant control are fundamental safety features of any aerial vehicle. With the emergence of complex, multi-body flying systems such as jet-powered humanoid robots, it becomes of crucial importance to design fault detection and control strategies for these systems, too. In this paper we propose a fault detection and control framework for the flying humanoid robot iRonCub in case of loss of one turbine. The framework is composed of a failure detector based on turbines rotational speed, a momentum-based flight control for fault response, and an offline reference generator that produces far-from-singularities configurations and accounts for self and jet exhausts collision avoidance. Simulation results with Gazebo and MATLAB prove the effectiveness of the proposed control strategy.
打开封面
下载高清视频
观看高清视频
视频下载器
农业机器人将养活世界|2023【Freethink】
3.85万人民币
NVIDIA Robotics:从自动驾驶到人形机器人|2024【英伟达】
Barkour:四足机器人实现动物级敏捷性|2023【Google DeepMind】
人形机器人ergoCub|2023【意大利技术研究院IIT】
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
「爬行抓取」机械手成精 能从手臂上溜走 拿完还能自动合体
开源人形机器人Hector:人形运动操纵控制|2023【南加州大学】
SELDA驱动的机器人腿跳跃|2022【IROS】
自动识别功能的仿生人形机器人
人形克隆手抓取不同物体|2022【clonerobotics】
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
为啥人形机器人不能站直了走路?从科学角度来讲讲!
BIOIC线驱软连续机器人|2022【德国弗劳恩霍夫研究所】
中国仿生机器人公司 EX机器人(EX Robot)
异构机器人团队的能量感知、无碰撞信息收集|TRO 2023【MIT】
只要2万美元!马斯克确认特斯拉机器人2.0 Optimus Gen 3可以完成的所有任务!
开源低成本遥操作系统:学习精细的双手遥操作|2023【斯坦福大学】
德国人形机器人4NE-1展示在家庭场景中的洗衣服 做菜 浇花等家务技能
人形机器人AI平台「Ameca」2021【英国Engineered Arts】
上海工博会进入倒计时,明天最后一天啦!今天和明天还可以来现场打卡哦~
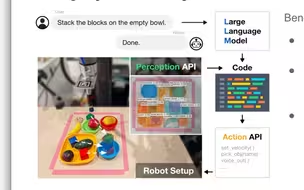
ChatGPT for Robotics:设计原则和模型能力|2023【Microsoft】
人形机器人:自监督学习的傅里叶潜在动力学|2024【MIT】
国产大尺寸仿鸵双足机器人 “大圣”|2023【五八智能科技(杭州)】
特斯拉第二代人形机器人Optimus|2023【Tesla】
代码作为策略: 用于具身控制的语言模型程序|2023【Google】
肌肉骨骼人形机器人自动驾驶|2020【日本东京大学】
在可变形地形上学习四足运动|2023|Science Robotics【韩国科学技术院】
机器人空间感知基础:实时层级编码系统|2023【MIT】
仿生蜜蜂BionicBee|2024【Festo】
MenteeBot人形机器人|2024【以色列MenteeBot Robotics】
国产人形机器人进厂打工,搬运物品有模有样,还能应对突发情况
Text2Motion:从自然语言指令到可行方案|2023【斯坦福大学】
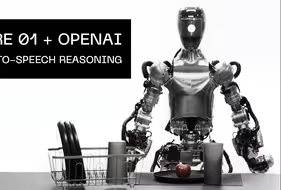
人形机器人Figure:OpenAI 语音到语音推理|2024【Figure】
语言到奖励学习机器人技能综合|2023【Google DeepMind】
告别液压人形机器人Atlas|2024【Boston Dynamics】
在大型、复杂的世界中进行高效自主探索|2023|Science Robotics【CMU】
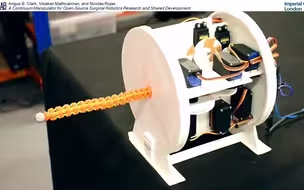
连续机械手-开源手术机器人研究|2021|帝国理工学院【T-MRB】
开源UniSim:神经闭环传感器模拟器|2023【waabi】
基于事件相机的位置识别|ICRA 2023【Queensland University of Technology】