V
主页
机器人底盘四轮差速模型详解
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
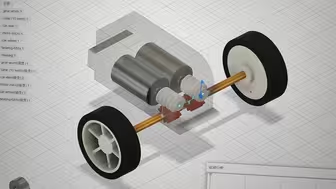
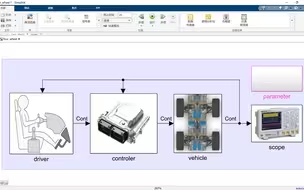
车辆仿真模型 | Matlab/Simulink | 四轮、六轮独立驱动 | 魔术公式
智能车培训-三轮差速、斜率偏差合成、PID教学,补充了上期电磁的一些知识点
3-7运动合成作用建模-四轮差动底盘(机器人)
《机器人SLAM导航核心技术与实战》书籍配套教学视频
智能车|四轮车这么做可以国一!软硬件全攻略
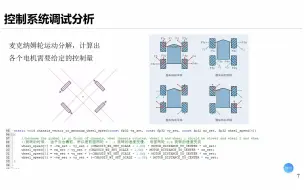
4-7控制系统综合案例-四轮底盘控制(原理与程序分析)
【Autolabor初级教程】ROS机器人入门
第三集 四轮差速模型求左右轮速度
二、ROS小车视频教程
基于轮式里程计与AGV视觉定位的物流机器人
【自己搭建机器人】底盘软件系统搭建
3-7自主移动机器人-运动合成作用建模-四轮差动底盘(机器人)的仿真实例vrep.coppeliasim
机器人底盘开发很简单吗
板控遥控配单向电调设置双电机差速转动(带教程)
机器人底盘为什么是核心技术
【自己搭建机器人】传感器选择
四轮四驱 差速转向 ros can 232 遥控
机器人机械臂与底盘设计
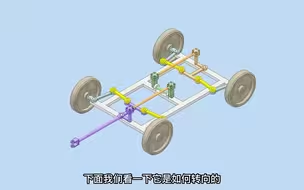
简单建个模,仿一下还挺有意思,打算用两个电机差速来解决小车转向问题,不过两侧轮子的支撑性可能不行*___*
机器人SLAM为什么需要编码器
stm32四轮寻迹小车跑地图
【gazebo仿真】四轮四转向机器人仿真
移动机器人的运动学与动力学建模
两轮差速底盘模型解析
简易差速器结构后驱小车基本架构—展示
机器人SLAM导航为什么需要轨迹跟踪
阿克曼移动机器人底盘 后驱前轮转向
四驱四转 四轮转向 四舵轮底盘 重载AGV 室外导航
【PowerPoint】二轮差速车辆模型 运动分析简图绘制
【自己搭建机器人】底盘硬件系统搭建
2024新款R20四轮差速ROS机器人 SLAM建图导航,视觉巡线,ROS2,英伟达Nano处理器
Warthog四轮四驱差速转向底盘
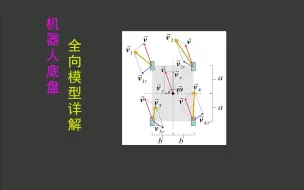
机器人底盘全向模型详解
C级车身A级操控,四轮转向来了【纸上谈车46】
机器人轮式里程计究竟是什么
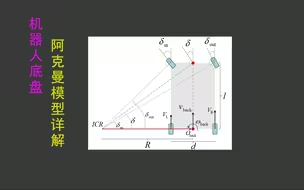
机器人底盘阿克曼模型详解
定制款四轮差速底盘
【自己搭建机器人】运动学模型选择
基于四轮转向的车辆运动学模型-1
一种简易的小车转向机构,主要是利用连杆驱动,一起看看吧