V
主页
机器人轮式里程计究竟是什么
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
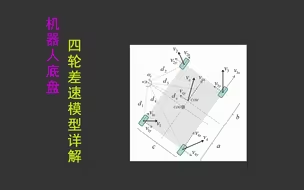
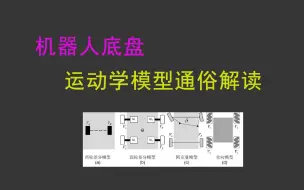
机器人底盘四轮差速模型详解
【自己搭建机器人】运动学模型选择
机器人底盘开发很简单吗
终于改装完成,户外机器人底盘,ROS,四轮驱动+阿克曼,支持二开
【全网最详细】摄像头原理分析
Flexsim物流仿真案例教学(AGV模块的使用)
《机器人SLAM导航核心技术与实战》书籍配套教学视频
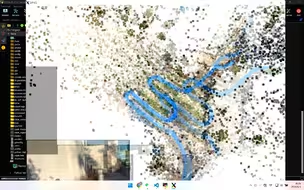
谷歌cartographer构建大规模地图(激光雷达+IMU+轮式里程计融合建图)
【一看就懂】SLAM算法原理通俗解读
粒子滤波的本质
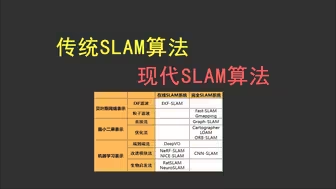
SLAM算法有哪些
机器人中的摄像头传感器
机器人底盘运动学模型通俗解读
IMU参数标定终于有人讲清楚了
【自己搭建机器人】主机选择
先学激光SLAM还是先学视觉SLAM
DPVO testing 0482
最小方差无偏估计
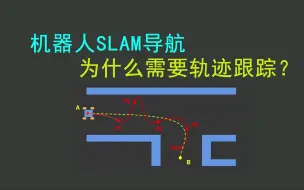
机器人SLAM导航为什么需要轨迹跟踪
【SLAM技术应用】有运动的地方就有SLAM
图像变换,其实我们每天在用
搞SLAM算法还有前途吗
IMU如何测加速度
【全网最详细】RGB-D相机原理分析
手把手教你做六足机器人!
基于rtabmap的视觉+激光SLAM融合建图
零基础一小时看懂路径规划《agv无人小车篇》第一集-介绍(合集附带代码)
【通俗易懂】SLAM实现导航的完整过程演示
图像ORB特征提取速度为什么快
SLAM算法源码正确阅读方式
【自己搭建机器人】底盘硬件系统搭建
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
SLAM算法实现为何基于ROS接口
2驱轮式巡检机器人
【机器人操作系统】学会ROS就学会机器人开发了吗
最大似然、最小二乘和贝叶斯估计的区别
【深入浅出】嵌入式终于有人给讲清楚了
SLAM技术是伪需求吗
C++、ROS和SLAM是什么关系
OpenCV图像处理与PCL点云处理