V
主页
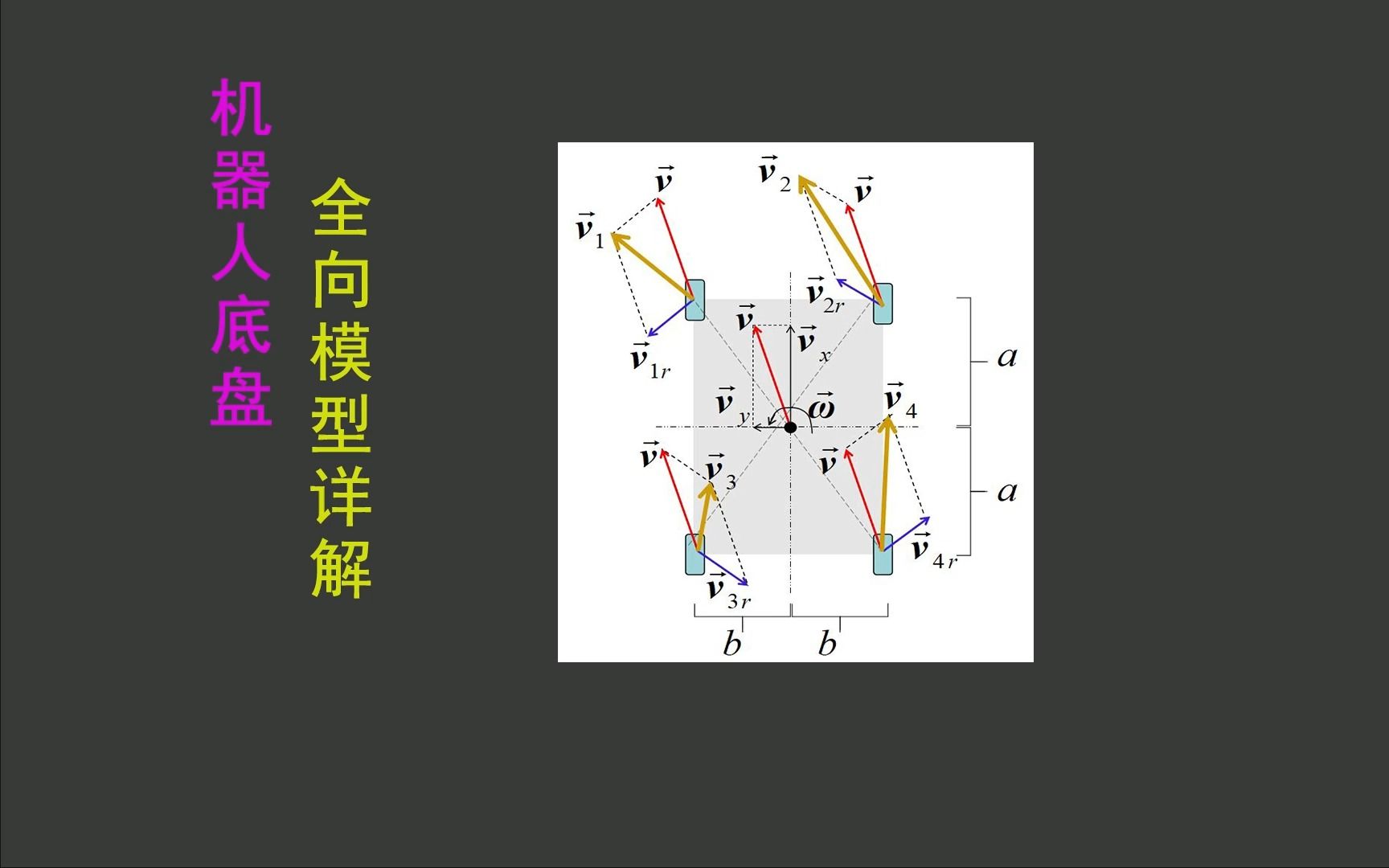
机器人底盘全向模型详解
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
机器人底盘四轮差速模型详解
【自己搭建机器人】底盘软件系统搭建
自研机器人底盘控制精度如何选择
自研机器人底盘里程计精度如何选择
机器人轮式里程计究竟是什么
【自己搭建机器人】底盘硬件系统搭建
【自己搭建机器人】传感器选择
机器人底盘为什么是核心技术
SLAM中的概率观测模型
激光雷达畸变校准
【激光SLAM专题】Cartographer原理通俗易懂
SLAM算法基本理论梳理
SLAM中的概率运动模型
视觉SLAM的本质多视图几何
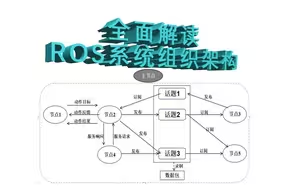
【机器人操作系统】全面解读ROS系统组织架构
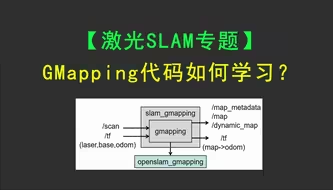
【激光SLAM专题】GMapping代码如何学习
【自制展示】+SLAM导航语音交互ROS机器人DIY+miiboo机器人组装教程
粒子滤波的本质
【全网最详细】摄像头原理分析
【激光SLAM专题】LOAM如何运行
机器人SLAM导航为什么需要轨迹跟踪
【一看就懂】SLAM算法原理通俗解读
【功能演示】+SLAM建图+自主导航+语音交互+(miiboo机器人出品)
【3D数学】欧拉角万向节死锁与插值
【全网最详细】RGB-D相机原理分析
SLAM算法的底层框架概率图模型
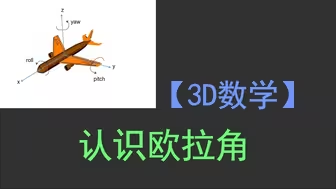
【3D数学】认识欧拉角
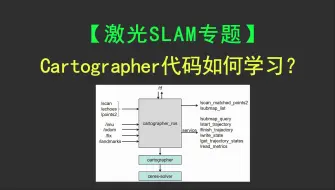
【激光SLAM专题】Cartographer代码如何学习
VEX IQ四电机八向底盘结构
树莓派是什么替代方案有哪些
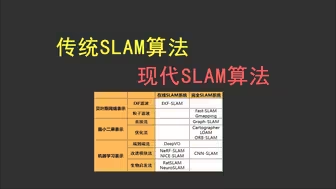
SLAM算法有哪些
SLAM技术是伪需求吗
SLAM算法的核心概率理论
机器人中的摄像头传感器
【激光SLAM专题】GMapping原理通俗易懂
ORB-SLAM2系统框架解读
SFM、BA和SLAM比较
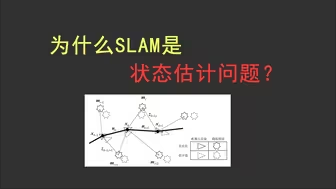
为什么SLAM是状态估计问题
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
【机器人操作系统】ROS本质上就是一个分布式通信框架