V
主页
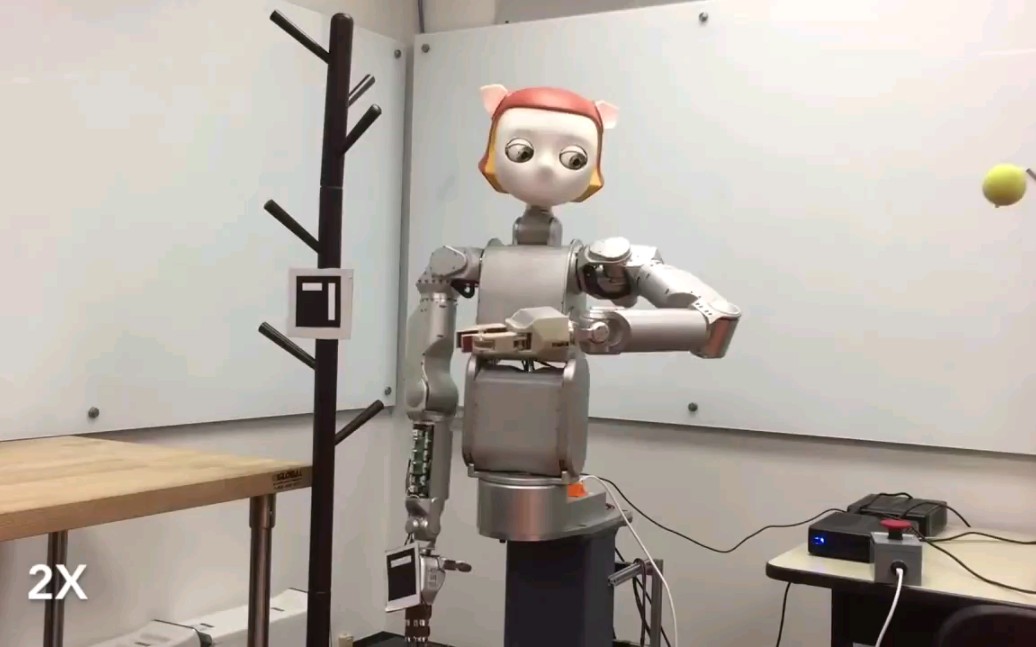
防止与物体碰撞的机器人
发布人
https://www.youtube.com/watch?v=pH11Hwg8ftA 这项研究由 UT 奥斯汀以人为中心的机器人实验室的博士生 Kwan Suk Kim 领导,通过人与机器人之间的实证调查探索标题问题的后果。 Kwan Suk 没有深入探讨伦理和道德问题,而是设计了概率方法,以便在物体或其他机器人与人之间可能发生碰撞时通知计算资源。 高于阈值时,如果机器人在碰撞轨道上前进,则分析这些估计的机器人会采取行动停止物体或其他机器人代理。 逻辑和运动规划器不是使用末端执行器来阻止碰撞,而是探索可以有效阻止碰撞的机器人身体最近的部分。 考虑进行干预的身体部位包括前臂、肩部、肘部、身体或末端执行器。 此外,如果机器人已经在用它的末端执行器执行一个动作,比如在环境中抓东西,规划者将首先探索不违反当前末端执行器任务的轨迹。 只有在没有发现受约束的身体部位来执行动作的情况下,规划者才会决定违反手头的末端执行器任务。 在这些视频片段中,Dreamer 人形机器人停止使用身体的各个部位——一个接近人的球,随后是轨道上的移动基地来击中其路径上的人。 你怎么看,应该允许机器人停止物体或停止其他机器人吗?
打开封面
下载高清视频
观看高清视频
视频下载器
世界上的女性机器人
双臂特种机器人
腿足机器人 极限跑酷
即使再忙,也别忘了生活该有的样子
全新构型可变形状的臂型机器人
这就是以人为中心的自动化解决方案的样子
爬墙机器人可在高真空和低真空之间切换
机器人智能工厂,让你感受一下科技的威力
可变形混合的无人机自主机器人系统
半人形轮式底盘双臂移动机器人
变形特性未知物体的人机协同搬运
轮足四足机器人 移动性的未来
轮腿式配送机器人爬楼梯的控制
会“飞檐走壁”的爬壁机器人
川崎重工「RHP Friends」双足机器人
仿生人偶二次元机器人
六足机器人爬楼梯
Digit类人机器人演示多机协同
四足机器人的腿部机构
10年前的仿人机器人技术,依然很难超越,什么原因呢?
直线运动转化成关节旋转的低成本关节机器人思路…
沉浸式体验鞋子的诞生之旅,科技的力量生产一双鞋子只需要三分钟。#鞋子 #科技的力量 #工业机器人#智能方 #ABB机器人#鞋子生产和流水线 #体验科技创新
机器人欣赏
轮足机器人户外自动安全巡逻 Ascento
水下机器人切割线缆演示
轮腿式机器人欢聚一堂
用于创建动态运动控制算法的双足实验
Tita模块化机械扩展快装轮足机器人
用于管道自主巡检的蛇型机器人
用于海底检查轻巧便携机械臂与末端执行器
复杂多连杆移动机器人
双足被动动态行走机器人
定量取出粉体称量自动化
Diablo刑天直驱轮腿式机器人使用示教
爬楼梯的机器狗 I 或许这就是开发双足或四足机器人的意义
带手臂的自主服务机器人
沉浸式体验电梯门的诞生之旅。#沉浸式#电梯门#机器人自动化技术#工业机器人#智能方 #ABB机器人#机器人生产电梯门@机器人ROBOTics
Apptronic Astra执行不同遥控任务汇编
机具创新自主避障爬楼梯送货机器人
外骨骼试装测试