V
主页
京东 11.11 红包
Variable admittance control preventing undesired oscillating behaviors...变导纳振荡问题
发布人
Variable admittance control preventing undesired oscillating behaviors in physical human-robot interaction 摘要: Admittance control is a widely used approach for guaranteeing a compliant behavior of the robot in physical human-robot interaction. When an admittance-controlled robot is coupled with a human, the dynamics of the human can cause deviations from the desired behavior of the robot, mainly due to a stiffening of the human arm, and thus generate high-frequency unsafe oscillations of the robot. In this paper we present a novel methodology for detecting the rising oscillations in the human-robot interaction. Furthermore, we propose a passivity-preserving strategy to adapt the parameter of the admittance control in order to get rid of the high-frequency oscillations and, when possible, to restore the desired interaction model. A thorough experimental validation of the proposed strategy is performed on a group of 26 users performing a cooperative task. 当导纳控制机器人与人耦合时,人的动力学会导致机器人的行为偏离预期的行为,主要是由于人手臂的僵硬,从而产生机器人的高频不安全振荡。 在本文中,研究人员提出了一种新的方法来检测人机交互中的上升振荡。 此外,作者提出了一种被动保持策略来调整导纳控制的参数,以消除高频振荡,并在可能的情况下恢复所需的交互模型。 对执行合作任务的 26 个用户组对所提出的策略进行了彻底的实验验证。 论文链接:https://ieeexplore.ieee.org/abstract/document/8206207/media#media 实验范式参考
打开封面
下载高清视频
观看高清视频
视频下载器
遨博i5,蓝点触控,机械臂,导纳控制,重力补偿,0.8N
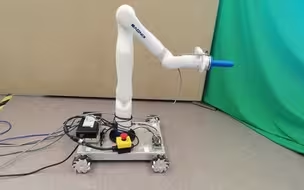
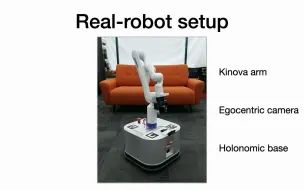
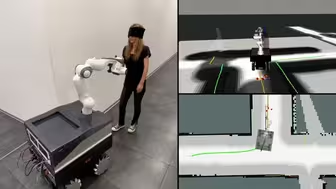
An admittance-controlled wheeled mobile manipulator for mobility assistance(邓宗全)
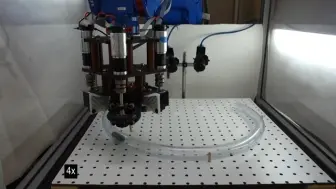
Magnetic Localization and Open-Loop Propulsion
Robot-assisted flexible endoscope remote and autonomous research 天津大学-支气管镜机器人
【搬运】人形机器人贴标签--Robots Doing Stuff #34 - Peeling and Applying a Label
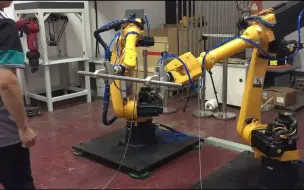
【搬】双臂变导纳控制(段晋军老师)
同心管机器人-用于肾脏手术-Western University
工程与艺术的融合,之江实验室,钟灵和音乐机器人“晓乐”-机器人弹钢琴
【搬】基于 EMG 的手臂肌电可变导纳控制【Using EMG for variable impedance control in human...
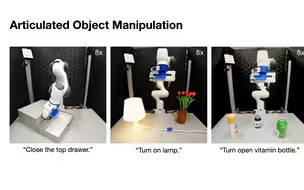
李飞飞【具身智能】-VoxPoser:可组的3D映射地图用于大语言模型的机器人操作
'Respiratory Motion Compensation and Teleoperated Needle Insertion-呼吸补偿
西门子旗下的血管介入机器人Corindus机器人辅助神经介入血管瘤栓塞研究How the CorPath GRX Cassette Works
Robotic PCI to RCA lesions, CorPath冠状动脉球囊扩张PCI,经皮右冠状动脉介入术RCA操作
Projected Force-Admittance Control for Compliant Bimanual Tasks
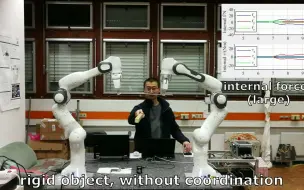
Fast dual-arm manipulation using variable admittance control
Admittance control for collaborative dual-arm manipulation
叠衣服机器人Home Robot Low-Cost Force Controlled Arm---Blue家庭通用机器人
复合机器人末端稳定:Whole-Body MPC for a Dynamically Stable Mobile Manipulator-----ETH
TidyBot: Personalized Robot Assistance with Large Language Models 大语言模型赋能机器人
人形机器人,并联结构Whole-Body Control of Series-Parallel Hybrid Robots
Sample-Efficient Policy Adaptation for Exoskeletons Under Variations in the User
你好ED Atlas!| ED Atlas 来啦 | 波士顿动力电驱Atlas001
【Full version】Outdoor Experiments of the GITAI's G1 robot(2020.8)
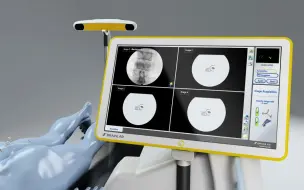
Brainlab Fluoro 2D Registration and Navigation
NACHI那智不二越机器人视频教程
十年Farewell|HD Atlas退役|波士顿动力
家庭通用机器人,叠衣服机器人ISER 2012 - PR2 Autonomously folding a Skirt
R-One 血管介入手术机器人
An Optimisation-Based Distributed Cooperative Control for Multi-Robot Manipulati
Robot-Assisted Navigation for Visually Impaired through Adaptive Impedance。。。
Knocking It Out Of the Ball Park!外骨骼
FANUC发那科机器人编程(共18集)
为什么发展人形机器人:大家电?Meet Anna™ – The Smart Household Robot
Corindus CorPath System - 3D Medical Animation_1080p穿刺介入手术机器人
Human In Motion Robotics外骨骼
AGV,AGV搬运机器人,智能AGV小车,AGV小车,潜伏式顶升AGV,堆垛式叉AGV。
Dual Arm Robot System(ITRI台湾工业技术研究院)
郑鼎侯俊霞工业机器人课程 从入门到精通 第3节:工业机器人的品牌
Human-multirobot-collaborative-mobile-manipulation-the-omnid-mocobots-visit-down
Lower-Extremity Rehabilitation Robots