V
主页
基于ICP点云配准的工件位姿估计-Open3D
发布人
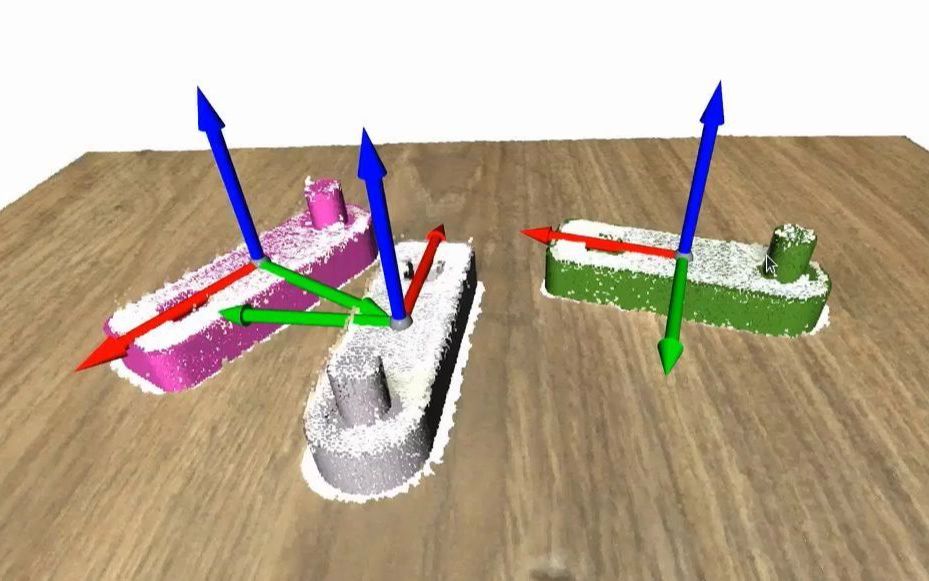
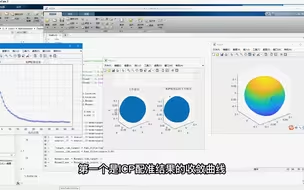
介绍了使用ICP配准算法来做工件位姿估计的整个流程, 同时也记录了算法优化的过程, 最终得到了一个比较理想的配准结果。 课程源码已上传到 《机械臂视觉抓取-从理论到实践》的课程交流群中。 注: 本课程所使用的点云数据由如本深入摄像头RVC Mini拍摄, 感谢如本科技对本课程的大力支持。
打开封面
下载高清视频
观看高清视频
视频下载器
点云配准的ICP算法测试
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
使用OpenCV模拟Pixy的核心功能+物块位姿估计
目前B站讲的最透彻的3D点云全套教程,包含点云配准、点云分割、点云补全及PointNet算法等核心知识!强烈建议收藏!
open3d系列(2)—将点云投影到图像上
位姿估计工具、数据集及网络
基于国产6轴机械臂的简单场景位姿识别抓取(进化版:改进视觉位姿估计网络)
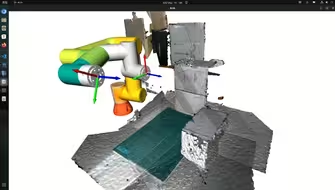
Open3D马克笔(圆柱体) 6DOF姿态估计 - 奥比中光 Gemini2
B站强推!2023公认最通俗易懂的3D点云教程完整版,点云配准、点云分割、点云补全、点云数据处理及pointnet算法解读,学完之后吊打面试官!计算机视觉|点云
CVPR2021|PointDSC:基于特征匹配的点云配准方法
基于RGB的物品6D位姿实时估计
点云入门处理与实战(Open3D)——表面重建
MaskRCNN实例分割-3D打印工件无序-Detectron2
法奥FR3 路径规划 OMPL+FCL+Open3D
【Python+Open3D处理点云数据】1.点云读写与显示
【Open3D】三维点云python教程,从未见过如此通俗易懂的三维点云算法教程 pointnet算法解读与应用领域分析 计算机博士让我学明白了!——3D点云
5.2-点云配准方法(下)
包装盒尺寸测量与姿态估计-奥比中光Gemini2 双目结构光3D相机
可乐罐6DOF姿态估计与抓取案例-法奥FR3-奥比中光Gemini2
点云处理之ICP交互式配准
三维点云配准(两帧)
3D相机案例展示-奥比中光Astra系列 OpenCV+Open3D+YoloV5+MediaPipe
【Open3D】三维点云python教程
包装盒6DoF位姿估计与机械臂码垛-勤劳的搬运工
Open3D实时三维重建配准
Anaconda环境下open3d点云安装和使用(持续更新)
点云配准教程第一讲:点云配准初识
港大&浙大提出Gen6D:从 RGB 图像估计 6 自由度物体姿势
激光SLAM前端里程计ICP算法推导和代码演示
PCL点云配准综述
基于ICP算法的三维点云模型配准matlab仿真
六维物体位姿估计与追踪:从实例级到类别级
通用性超强!同时实现6D位姿估计和跟踪!
OpenCV物块3D位姿估计
Open3D与点云处理简介(公开课)
三维点云处理技术和深度学习在点云处理中的应用
三维点云课程 超级详细
使用open3d的接口函数融合图像和点云数据
ICP算法概述及使用SVD推导
【ICCV 2023】RegFormer:点云配准新方案!