V
主页
5.2-点云配准方法(下)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
6.2-点云常用特征描述(上)
4.2-点云滤波方法
3.2-刚体运动坐标转换1
4.4-点云分割拟合聚类方法
4.5-演示1:点云滤波方法
6.1-点云关键点检测
2-3点云的基本特征及描述
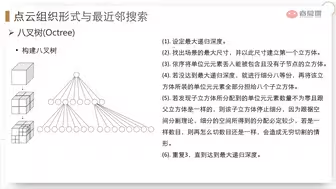
4.3-点云组织形式与最近邻搜索
1-2激光雷达原理
5-5 SLAM图优化基础
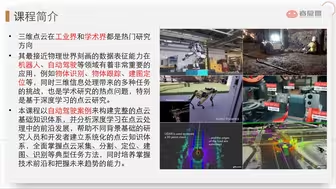
1-1课程概述
1-3激光雷达安装、标定与同步
1-5常用编程基础
2-1三维表征的获取方式和原理
3.1-欧式坐标系
1-4激光雷达数据采集
5.4-帧间匹配与激光里程计
任务1-1 课程概述
5.5-SLAM图优化基础
1-4
2-2三维信息的表征形式
7-1
4.1-Point Cloud Library
4.6-演示2:点云组织形式与最近邻搜索
1-3-kernel PCA
7-5 深度学习-网络训练优化
任务3-2 前端里程计-NDT
任务11 内容回顾
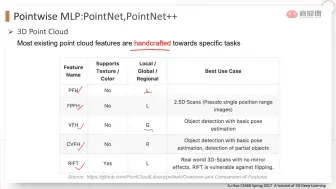
8-3 Pointwise MLP:PointNet,PointNet++(上)
任务4 前端里程计LOAM系列
中考时间紧任务重?喂饭教学10小时搞定思想方法490题搞定所有压轴题
任务7 LeAM-LOAM代码讲解
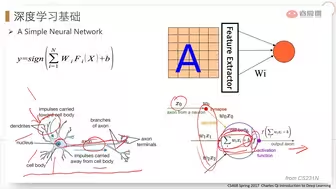
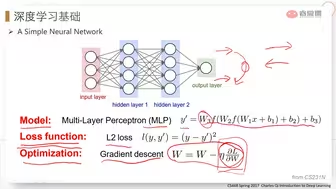
7-2 一种简单的人工神经网络
任务5 数据集实现及精度评价方法
任务3-1 前端里程计-ICP
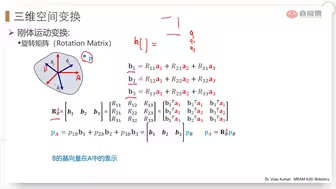
3.4-三维空间变换
7-3 深度学习-网络结构(上)
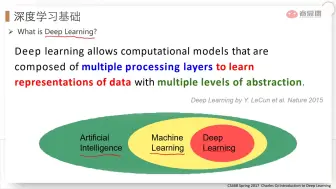
7-1 深度学习介绍
网络工程师必会30+个常见网络故障案例丨排查思路/故障现象/解决及防范方法,解决99.99%的故障难题
1-1Introduction