V
主页
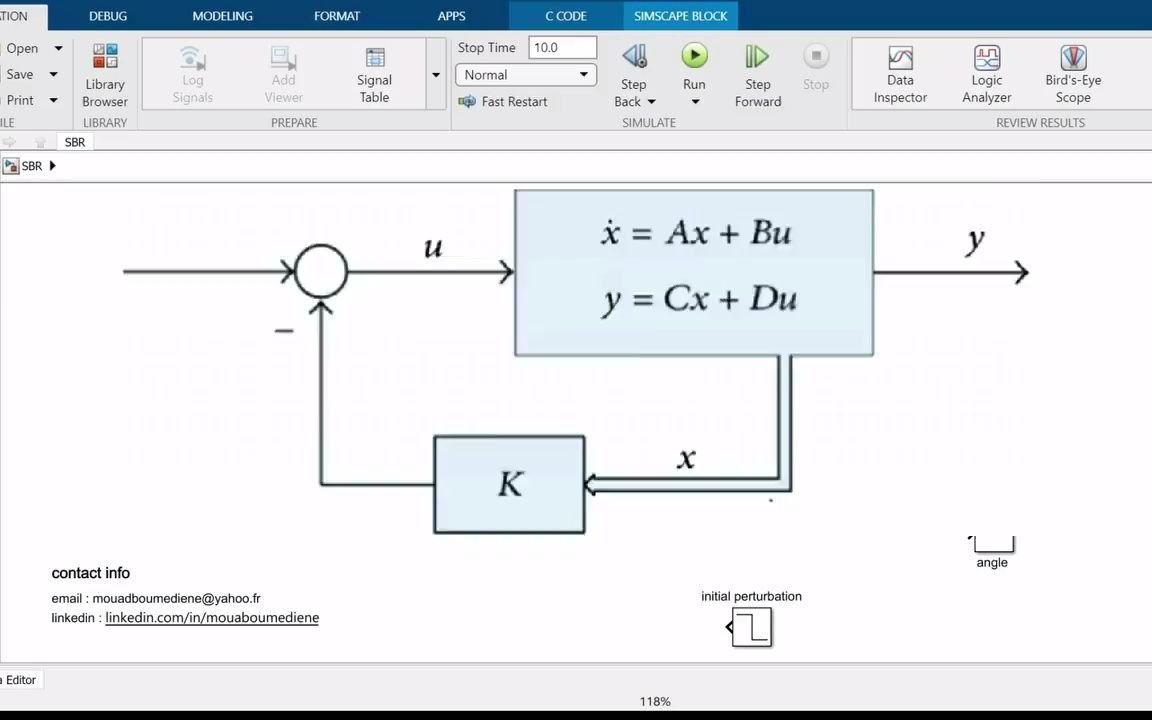
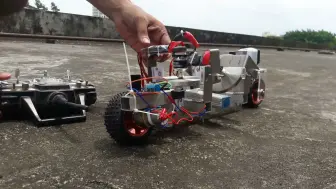
applying an LQR command on a self-balancing robot in Simulink
发布人
https://www.youtube.com/watch?v=SY8KtZ2hO9Q
打开封面
下载高清视频
观看高清视频
视频下载器
乐高-球形机器人
arduino官方自平衡自行车资料解读(5)理论-仿真-实践
啥时候的机器人格斗赛,开场白能听到“咏春。Robot问”
Motorcycle Self Balancing Using Reinforcement Learning
两轮汽车的工作原理
【开源】 MATLAB Simulink 自平衡机器人
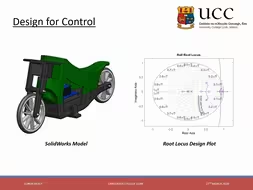
UCC的自平衡摩托
Gyroscopic Stabilization of a Two Wheeler
Andy Ruina解释为什么自行车能够自平衡
PyRoboLearn_ Kinematics
这是我见过的众多Lit Motor视频中,比较好的一个
做的很棒的几款飞行机器人
Flexure joints for large range of motion by Precision Engineering
V-Coptr Falcon 摆臂双旋翼
PyRoboLearn_ Dynamics
ITNG 2019 - An Architecture to Connect the Dynamixel AX-12A to the
【纪录片】Human Robot
自平衡机器人进化-越野机器人
TD3 Reinforcement Learning On Bipedal Robot
没有线的风筝,照样飞!!!
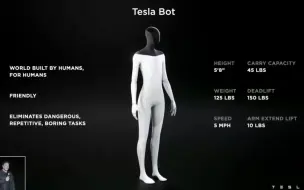
Tesla Bots 特斯拉提出的人形AI机器人
Terence the Robot's reinforcement learning lessons continue
MIT的变形机器人
破解肢体语言的秘密,用于机器人技术
Creating Qt GUI to Control a Robot - Part 1 _ For the Arduino Robot Project
TOP 6_ Best Robotic Window Cleaners For 2022 _ Remote Controlled Vacuum Washer F
乐高多轮障碍攀爬车
小可爱的飞机头机器人在争抢的时候不小心弄坏啦,胖虎帮忙维修!
反作用轮与力矩陀螺的区别。。
How to connect the TB6612FNG Dual H-Bridge motor dirver to an Arduino and Raspbe
国内首个大尺寸-仿鸵鸟双足机器人
机甲启动、受击、死亡动画参考
Insectlike robots 仿生昆虫机器人
最新分体式火星车
Real World Human Robot Collaborative Reinforcement Learning
1X发布了最新一代的人形机器人NEO Beta 家用型的人形机器人
Simulink中仿真的一个轮胎
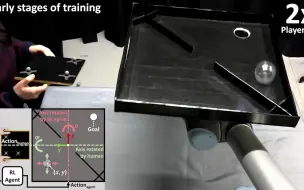
LBGP_ Learning Based Goal Planning for Autonomous Following
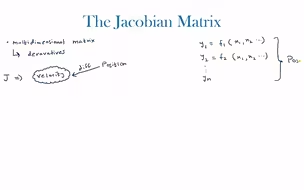
Jacobian Matrix 雅可比矩阵与奇点
我的ESP32机器人已经可以扫码连网啦