V
主页
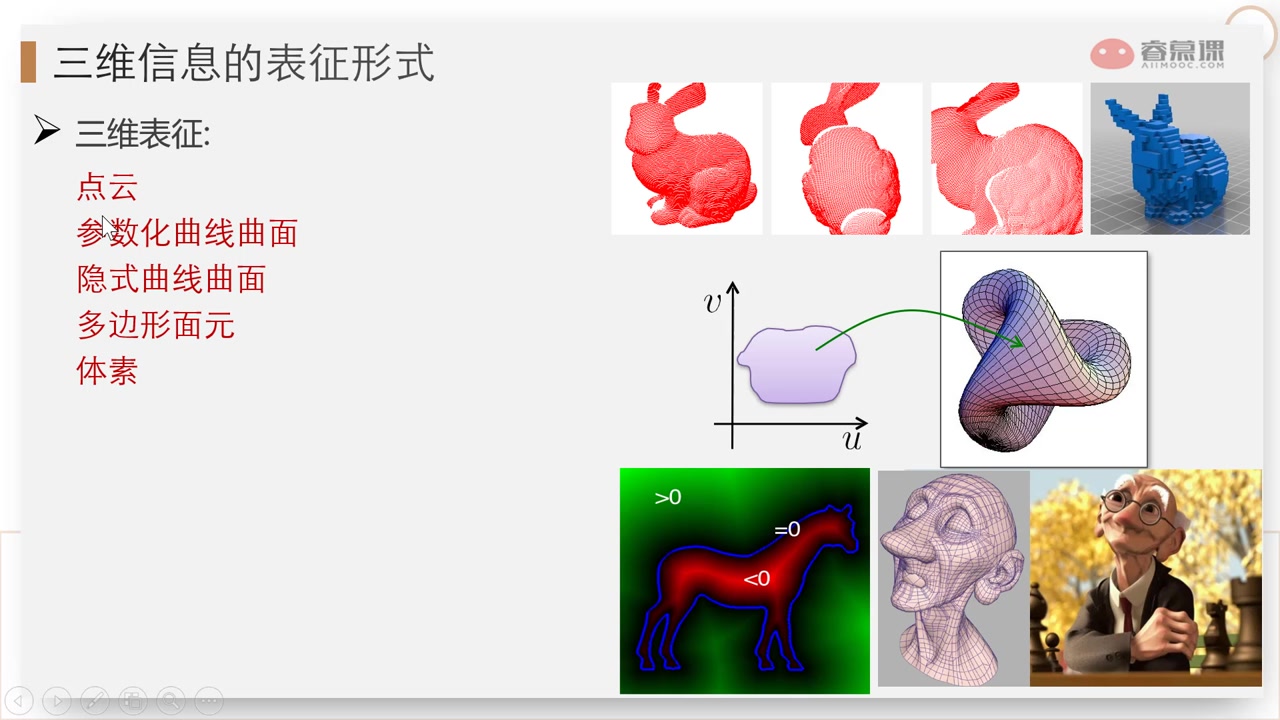
2-2三维信息的表征形式
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
3.2-刚体运动坐标转换1
4.2-点云滤波方法
2-1三维表征的获取方式和原理
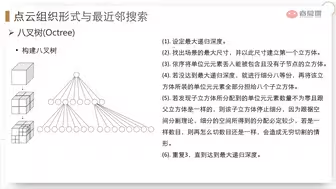
4.3-点云组织形式与最近邻搜索
3.3-刚体运动坐标转换2
1-3激光雷达安装、标定与同步
3.1-欧式坐标系
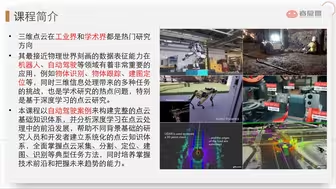
1-1课程概述
6.1-点云关键点检测
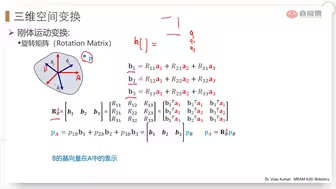
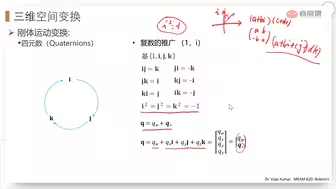
3.4-三维空间变换
5.4-帧间匹配与激光里程计
1-4激光雷达数据采集
5.5-SLAM图优化基础
4.5-演示1:点云滤波方法
1-2激光雷达原理
2-3点云的基本特征及描述
1-5常用编程基础
6.2-点云常用特征描述(上)
1-1Introduction
旅游英语口语
任务1-1 课程概述
【全198集】PR剪辑全套教程,学完大学后期课提前“毕业”!
5-5 SLAM图优化基础
4.6-演示2:点云组织形式与最近邻搜索
任务3-1 前端里程计-ICP
7-1
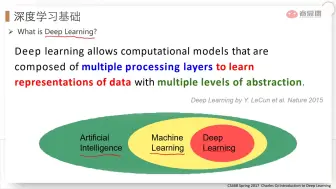
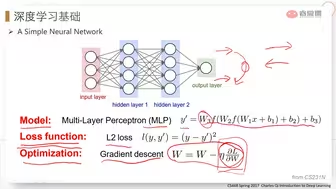
7-3 深度学习-网络结构(上)
任务4 前端里程计LOAM系列
任务12 回环检测
任务3-2 前端里程计-NDT
注册电气工程师(供配电/发输变电)专业考试如何开始准备?及24年供配电专业案例考试真题一题一视频审解析
4.4-点云分割拟合聚类方法
这才是科研人该学的【Opencv+Pytorch】教程!一口气学完目标检测、图像分割、语义分割、图像生成,算法原理+实验分析,太通俗易懂了!机器学习|深度学习
1-4
4.1-Point Cloud Library
4.7-演示3:segmentation代码和聚类 拟合
Transformer真的不难啊!100集带你逐层分解Transformer模型——注意力机制、神经网络、位置编码、编码器、解码器等!算法原理+实战,通俗易懂!
5.2-点云配准方法(下)
【PR教程】盲目自学只会毁了你自己,20个PR剪辑时的小技巧,快速提升你的剪辑效率
【附源码】毕设有救了!整整30套CNN卷积神经网络项目!新手轻松拿捏!学完就能玩透人工智!pytorch/机器学习/计算机视觉/深度学习/Python