V
主页
开源项目CatGrasp:学习类别级任务相关的抓取|2022|ICRA【Intrinsic Innovations&罗格斯大学】
发布人
网站:https://sites.google.com/view/catgrasp GitHub:https://github.com/wenbowen123/catgrasp 论文:Wen, B., Lian, W., Bekris, K., & Schaal, S. (2021). CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation. arXiv preprint arXiv:2109.09163. https://arxiv.org/pdf/2109.09163.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
ViPlanner:用于局部导航的视觉语义学习 |ICRA 2024【苏黎世联邦理工学院&英伟达】
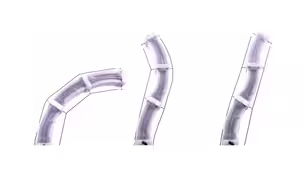
BIOIC线驱软连续机器人|2022【德国弗劳恩霍夫研究所】
loco-mujoco:MuJoCo模仿学习复杂运动任务|2023【德国达姆城工业大学】
MetaUrban:城市环境中的具身人工智能模拟平台|2024【加州大学洛杉矶分校】
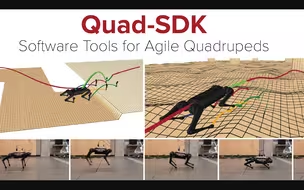
开源敏捷四足机器人运动软件框架Quad-SDK|2022 ICRA【卡内基梅隆大学】
模仿鱼群行为的机器人集群控制|2024 ICRA【西班牙格拉纳达大学】
机器人手利用触觉感知抓鸡蛋「触觉感知传感器DIGIT」2021【Facebook】
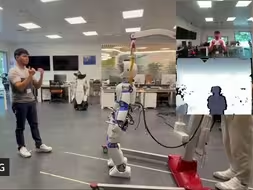
XBG:ergoCub人形机器人自主交互行为的端到端模仿学习|2024【IIT】
开源MonoNav:通过单目深度估计和重建进行导航|2023【普林斯顿大学】
MenteeBot人形机器人|2024【以色列MenteeBot Robotics】
人形机器人:自监督学习的傅里叶潜在动力学|2024【MIT】
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
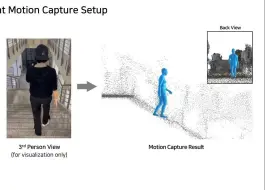
开源动捕:头戴式摄像头+智能手表|2024【首尔国立大学】
birdbot:一种高效节能的机器人腿|2022|Science Robotics【德国马克斯·普朗克研究所】
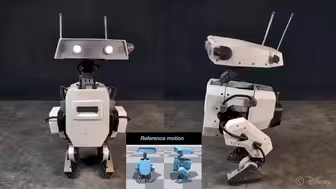
双足机器人角色的设计与控制|2024 RSS【迪士尼】
逼真面部表情机器人:人机面部表情协同|2024|Science Robotics【哥伦比亚大学】
可行走、游泳和爬行的仿生多模态水下机器人|2024 TRO【韩国浦项科技大学】
OpenBot:将智能手机变成机器人|2022【Intel OpenBot】
Magnecko;机器人像蜘蛛侠一样爬墙和天花板|2023【苏黎世联邦理工学院】
机器人大语言模型综合技能学习:从语言到奖励|2023【Google】
仿生蜜蜂BionicBee|2024【Festo】
用于微型飞行器的液体放大执行器|2022|英国布里斯托大学【Science Robotics】
Agile But Safe:学习无碰撞高速腿式运动|2024【CMU】
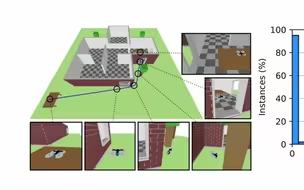
VLFM:零样本语义导航|2024 ICRA【波士顿动力AI研究所】
机器人学|2017|杨谷洋【台湾交通大学】
运动规划:利用凸优化绕过障碍|2023|Science Robotics【MIT】
半机器甲虫:像机器人一样被控制的真正昆虫|2016【南洋理工大学】
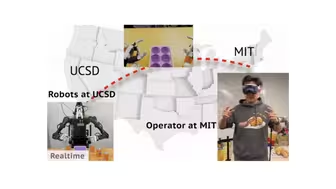
Open-𝐓𝐞𝐥𝐞𝐕𝐢𝐬𝐢𝐨𝐧🤖:沉浸式主动视觉反馈的人形机器人遥操作|2024【加州大学圣地亚哥分校&MIT】
开源LEAP Hand: 低成本、高效、仿人的机器人手学习|2023 RSS【卡耐基梅隆大学】
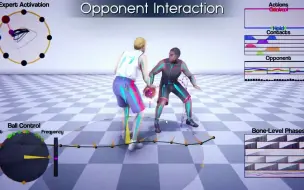
AI4Animation:基于深度学习的动画角色控制|2022【ACM Trans. Graph】
人形机器人Digit: 学习真实世界的运动|2023【加州大学伯克利分校】
智能家居机器人Anna|2022【丹麦AnnaOne ApS】
Hello Robot:第三代Stretch 3|2024【Hello Robot】
LINQ:基因组学实验室自动化解决方案|2023【英国Automata】
扑翼机如何自主栖息在树枝上|2022【瑞士洛桑联邦理工学院】
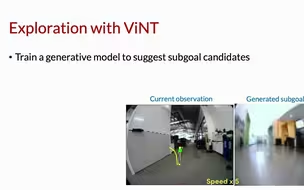
ViNT:视觉导航大模型|2023【加州大学伯克利分校】
SNAP:自监督神经地图|2023 NeurIPS【Google】
戴森机器人学习实验室Internship|2023【Dyson Robot Learning Lab】
软体生长机器人|2024|Science Robotics【意大利IIT】
机器人视觉超宽视场针孔复眼|2024|Science Robotics【香港科技大学】