V
主页
loco-mujoco:MuJoCo模仿学习复杂运动任务|2023【德国达姆城工业大学】
发布人
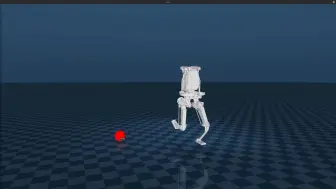
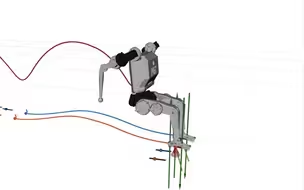
GitHub:https://github.com/robfiras/loco-mujoco Imitation learning benchmark focusing on complex locomotion tasks using MuJoCo. LocoMuJoCo is an imitation learning benchmark specifically targeted towards locomotion. It encompasses a diverse set of environments, including quadrupeds, bipeds, and musculoskeletal human models, each accompanied by comprehensive datasets, such as real noisy motion capture data, ground truth expert data, and ground truth sub-optimal data, enabling evaluation across a spectrum of difficulty levels.
打开封面
下载高清视频
观看高清视频
视频下载器
开源代码已添加 Mujoco 仿真器支持,该视频为启动演示
MuJoCo 仿真 案例欣赏
[搬] 通过 3D SLIP+足部动力学实现高度机动的人形跑步
MuJoCo机器人强化学习仿真入门|从零开始的MuJoCo世界生活之强化学习篇【课程试看】
开源:使用mujoco进行pai双足机器人仿真
我是如何学习强化学习的
DeepMind开源的MuJoCo机器人物理仿真引擎试玩
【转载】MuJoCo Python 教程 --Pranav Bhounsule
win10系统安装mujoco高级物理模拟器的步骤及运行仿真时效果展示
宇树科技B1mujoco仿真
MuJoCo机器人阻抗控制仿真【课程试看】
近乎Cassie的双足机器人运动控制-自研
【人形机器人规划和控制】全身运动规划之旋转跳跃
Imitation Learning模仿学习综述
【强化学习】MuJoCo Menagerie 机器人仿真
强化学习:Distributional Soft Actor-Critic(DSAC)算法在Gym Mujoco中的测试效果
2022年5月Win10系统安装开源mujoco教程,奶奶都会的那种
ANYmal-C四足机器人运动控制和四种关节结构变形的mujoco仿真
人工肌肉来了,它将让智能机器人更有力量 | TED演讲
NMPC+WBC+mujoco仿真 12自由度双足人形机器人行走控制
LocoMuJoCo:支持宇树人形Unitree G1的机器人仿真库
RoboGen:释放机器人自动学习的潜力
【更新完毕】MuJoCo 200版本系列教程 (2022)by Pranav A. Bhounsule
[开源软件]最近测试了一下mujoco,玩了一下cassie的仿真,安装很简单,大家可以玩一下
安装OpenAI Gym实现强化学习经典游戏复现[Classic Control, Toy Text, Box2D, MuJoCo, Atari]
MIT双足机器人使用强化学习学习走路的模拟--有urdf stl文件以及mujoco用的xml文件
小电控轮滑机器人
国产通用人形机器人合集|未完待续【2023】
Figure:通用人工智能类人机器人|2023【Figure】
【VREP】柔体仿真Robotics Simulator MuJoCo in CoppeliaSim
机器人学习寻求帮助|2023【Google Deepmind】
RoboHive:机器人学习的统一框架|2023【CMU】
使用mujoco的碰撞检测接口进行路径规划
你说,公主请上坡
和稚晖君干奖金超10万:智元机器人招聘直播回放
PID、LQR、MPC实时控制倒立摆仿真对比
会聊天的四足机器人spot+chatGPT|2023【Boston Dynamics】
MOBINN:爬楼梯送货机器人|2023【现代HYUNDAI】
机器人Stretch进化 |2023【 Boston Dynamics】
4.LQR的QP解法 -【推导尊享】CMU16-745最优控制