V
主页
ViPlanner:用于局部导航的视觉语义学习 |ICRA 2024【苏黎世联邦理工学院&英伟达】
发布人
ViPlanner: Visual Semantic Imperative Learning for Local Navigation Website:https://leggedrobotics.github.io/viplanner.github.io/ Code:https://github.com/leggedrobotics/viplanner
打开封面
下载高清视频
观看高清视频
视频下载器
四足机器人学习爬梯子|2024【苏黎世联邦理工学院】
学习轮腿机器人的鲁棒自主导航和运动|2024|Science Robotics【苏黎世联邦理工学院】
VLFM:零样本语义导航|2024 ICRA【波士顿动力AI研究所】
MenteeBot人形机器人|2024【以色列MenteeBot Robotics】
人工智能和机器人揭开了苍蝇翅膀运动的控制机制|2024|Nature【加州理工】
Anymal:多功能多触点规划和控制|2023|Science Robotics【苏黎世联邦理工学院】
用于外骨骼的人机连接系统|2023【苏黎世联邦理工学院】
可穿戴肌肉Myoshirt:上肢日常生活辅助|2022【苏黎世联邦理工学院】
🔥ANYmal Parkour跑酷:学会敏捷导航|2024|Science Robotics【苏黎世联邦理工学院&英伟达】
NVIDIA Robotics:从自动驾驶到人形机器人|2024【英伟达】
四足机器人从视觉学习地形物理参数|2024【苏黎世联邦理工学院】
Ascento机器人滑雪场畅游|2024【苏黎世联邦理工】
ANYexo 2.0:完全驱动的上肢外骨骼|TRO 2023【苏黎世联邦理工学院】
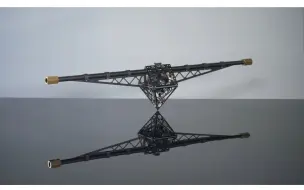
扑翼机如何自主栖息在树枝上|2022【瑞士洛桑联邦理工学院】
仿生蜜蜂BionicBee|2024【Festo】
SMUG Planner:挑战环境中的多目标规划器|2024【苏黎世联邦理工】
Ascento作为守夜人|2023【苏黎世联邦理工学院】
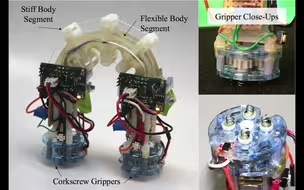
Flippy:一种软体自主攀爬机器人|2017【哈佛大学工程与应用科学学院】
Solo四足机器人学习多技能局部导航|2024 ICRA【马克斯·普朗克智能系统研究所】
Ascento Pro专业版|2021【苏黎世联邦理工学院】
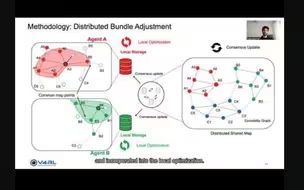
分散式协作SLAM|ICRA 2023【苏黎世联邦理工学院】
开源Mobile ALOHA:学习双手移动操作|2024【斯坦福大学】
Magnecko;机器人像蜘蛛侠一样爬墙和天花板|2023【苏黎世联邦理工学院】
2023单轮立方体 VS 2013三轮立方体【苏黎世联邦理工学院】
开源MonoNav:通过单目深度估计和重建进行导航|2023【普林斯顿大学】
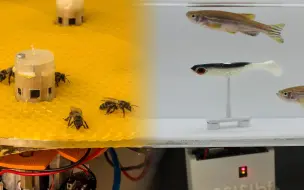
机器人使蜜蜂和鱼能够相互交谈|2019|EPFL洛桑联邦理工学院【Science Robotics】
人形机器人:自监督学习的傅里叶潜在动力学|2024【MIT】
四足机器人复制动物运动方式|2022 IROS【苏黎世联邦理工】
XBG:ergoCub人形机器人自主交互行为的端到端模仿学习|2024【IIT】
软机器蛇实时仿真|2019【伍斯特理工学院】
机器人物料搬运机的动态投掷|2024【苏黎世联邦理工学院】
人工智能学习海洋中水下航行|2021|Nature Communications【加州理工学院Caltech】
开源OrienterNet:2D公共地图中的视觉定位|2023【Meta AI】
NVIDIA Isaac 移动机器人3D环绕视觉感知|2024【英伟达】
模仿鱼群行为的机器人集群控制|2024 ICRA【西班牙格拉纳达大学】
更轻、更小、更便宜的Stretch开源机器人设计|2022【佐治亚理工学院】
利用大语言模型增强机器人导航(ReMEmbR)
开源图像分割Segment Anything Model|2023【MetaAI】
ConceptGraphs:用于感知和规划的开放词汇3D场景图|2023【MIT】
mGripAI:3D视觉、软抓取和人工智能(AI)解决方案|2022【美国Soft Robotics Inc.】