V
主页
京东 11.11 红包
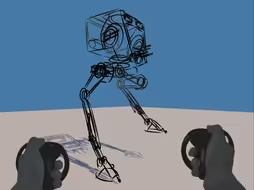
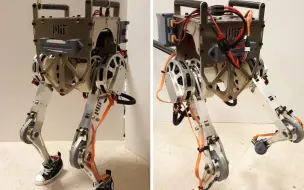
双足机器人角色的设计与控制|2024 RSS【迪士尼】
发布人
https://la.disneyresearch.com/publication/design-and-control-of-a-bipedal-robotic-character/ Design and Control of a Bipedal Robotic Character, Robotics: Science and Systems 2024
打开封面
下载高清视频
观看高清视频
视频下载器
RobotSketch: 腿式机器人超快速设计的交互式展示|SIGGRAPH 2024【韩国科学技术院】
NVIDIA Robotics:从自动驾驶到人形机器人|2024【英伟达】
艺术新片速递——女仆机器人起源 Maid Droid Origins (2024)
机器人运动扩散模型:机器人角色的运动生成|2024【迪斯尼】
记录从零驯服双足机器人day24
[荒野机器人】高清1080p已上传
【全874集】目前B站最全最细的ChatGPT零基础全套教程,2024最新版,包含所有干货!一天就能从小白到大神!少走99%的弯路!存下吧!很难找全的!
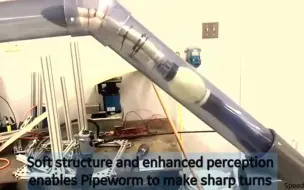
管-虫机器人“Pipe-worm” Robot|2022【通用电气】
机器人角色运动学优化设计|2023 ACM SIGGRAPH【迪士尼】
逼真面部表情机器人:人机面部表情协同|2024|Science Robotics【哥伦比亚大学】
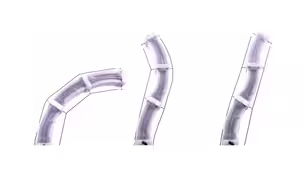
BIOIC线驱软连续机器人|2022【德国弗劳恩霍夫研究所】
客户案例 | 基于松灵RANGER MINI 3.0底盘的双臂升降式具身智能平台的无限可能
被动动态双足行走:迈向乐高大小人形机器人|2022 ICRA【卡内基·梅隆大学】
开源敏捷四足机器人运动软件框架Quad-SDK|2022 ICRA【卡内基梅隆大学】
MIT mini cheetah通过无模型学习实现敏捷运动|2022【MIT】
再来一段特斯拉机器人的视频,这次人味更重了
机器人遥操作的辐射场|2024【ETH Zürich】
在256KB内存的STM32上训练神经网络|2022【MIT】
Magnecko;机器人像蜘蛛侠一样爬墙和天花板|2023【苏黎世联邦理工学院】
基于人体全身动态远程运动的双足机器人行走控制|2022【伊利诺伊大学厄巴纳-香槟分校】
最佳论文!Robotwin:首个双臂协同机器人策略学习Benchmark
MyoSuite:统一神经和运动智能的具身AI平台|2022【Meta】
Neural-fly:快速学习在强风中敏捷飞行|2022|加州理工学院【science robotics】
四足机器人负重全身运动操纵|2024【南加州大学】
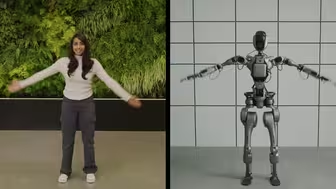
1X人形机器人:全神经网络、全自主、全1X倍速|2024【1X】
birdbot:一种高效节能的机器人腿|2022|Science Robotics【德国马克斯·普朗克研究所】
icub人形机器人展示:Giorgio Metta|2021【IIT】
SpaceBok:低重力下像猫一样跳跃的机器人|2022|ETH Zürich【T-RO】
遥操作Little HERMES双足机器人|2019【MIT】
ECCV'24 Oral | 王东林团队提出PiTe:时空对齐视频大模型,增强视频语义理解,提升视频语言模型性能!
四足机器人从视觉学习地形物理参数|2024【苏黎世联邦理工学院】
Rotebrate回椎動物(2022)|山中俊治【東京大学】
OpenAI大模型Sora:从文本生成高清视频|2024【OpenAI】
AI让虚拟苍蝇栩栩如生|2024【Google Deepmind&霍华德·休斯医学研究所】
四足机器人学习爬梯子|2024【苏黎世联邦理工学院】
触手机器人可以轻轻抓取易碎物品|2022【哈佛大学】
开源MonoNav:通过单目深度估计和重建进行导航|2023【普林斯顿大学】
幽灵公主阿席达卡座骑四足机器人-亚克路|2022东京国际机器人展【日本川崎重工業】
机器人上下楼梯算什么?现在爬90度梯子比你还快! #机器人 #四足机器人 #强化学习 #机器人技术 #机器人应用 @X科技馆
波士顿动力四足机器人Spot也用强化学习了?|2024【Boston Dynamics】